
Perseverance sur Mars

Sauf si vous habitez une grotte, vous avez dû voir que quelque chose venait d’arriver sur Mars !
Vous vous dites peut-être que c’est un grand battage médiatique pour un énième robot que l’on envoie sur Mars, pas de quoi en faire un plat !
D’un côté, vous n’avez pas tord ! La première tentative de vol automatique en direction de Mars date de 1960, avec Mars1960A, à peine 3 ans après Spoutnik, le premier satellite artificiel et ses petits ‘bip bip’. Ces petits ‘bips’ étaient simplement une preuve que les radio-amateurs pouvaient percevoir comme quoi les russes avaient réussis à envoyer un objet en orbite.
A cette époque, beaucoup croyaient encore aux martiens, à des chenaux qu’ils avaient creusés sur toute la planète pour l’irriguer depuis les pôles. Ce mythe provient du livre « La Pluralité des Mondes » de 1862, de Camille Flammarion, celui là même, qui a créé les éditions Flammarion. L’auteur se basait sur le résultat des observations de la planète avec le matériel de l’époque. Des taches et des rayures semblaient naître régulièrement. Et plutôt que de remettre en question leur matériel, ils ont préférés imaginer des mondes extraordinaires.
C’est bien de garder une part de rêve, non ?
Vu les connaissances de l’époque, c’est normal en effet. Mais cela manquait cruellement de rigueur scientifique.
Bon, et ce robot des années 60 ?
Ce fut un échec… comme ses successeurs 1960B, 1962A, 1962B, 1962C, Mars1, Zond2 et Mariner 3. Et finalement comme environ une mission sur 2 qui tente d’aller en direction de la planète rouge.

C’est finalement en juillet 1965 que la sonde américaine Mariner 4 s’approche suffisamment de Mars pour la survoler et envoyer ses premières photos depuis l’espace.
Haaa ! Ils ont dû être heureux alors !
Ben, pas vraiment… Ils s’attendaient à un monde un peu plus aride que la Terre mais avec des traces de vies comme de la végétation. Et finalement, les 22 photos en basse résolution qui arrivent montrent un paysage gris semblable à la Lune, avec de nombreux cratères d’impacts. De plus, on ne détecte qu’une très fine couche atmosphérique, une température au sol de 100° en dessous de 0 et pas de champs magnétique. Adieu les fantasmes de nouveaux continents à explorer ! On ne croit définitivement plus à la vie sur cette planète…
En novembre 1971, Mariner 9 est la première mission qui arrive à atteindre Mars et même à se satelliser autour de la planète. Ce n’est désormais plus un simple survol mais on va pouvoir cartographier une bonne partie de la planète.
Cool ! On a dû découvrir toutes les merveilles de Mars !
Non… Lorsque la sonde est arrivée en orbite martienne, une grosse tempête battait son plein. Elle avait dégagé un nuage de poussière qui occultait toute la planète. On ne voyait rien ! Heureusement, cette tempête se calma et la poussière retomba sur le sol après un mois d’attente.
Même si la planète semblait toujours aussi aride, elle nous a quand même offert un beau spectacle en dévoilant des paysages bien plus intéressants que les missions précédentes, avec des volcans de 21 km d’altitude, des canyons de 6 km de profondeur, et même ce qui pourrait ressembler à d’anciens lits de rivières ! On s’est de suite mis à imaginer de nouveau de la vie sur la planète, au moins dans un lointain passé.
Alors qu’ils excellaient pour explorer la planète Venus, les russes n’arrivaient jamais à atteindre Mars. Ce sont encore les américains qui arrivèrent à poser pour la première fois non pas un atterrisseur, mais deux : Viking 1 et 2, en septembre 1976. C’est un succès total, ils transmettront des photos et des données à la Terre pendant 6 ans !
Pourquoi en envoyer deux d’un coups ?
Puisqu’une mission martienne sur 2 est un échec, on a forcément plus de chances d’arriver à bon port avec deux missions envoyées à quelques jours près.
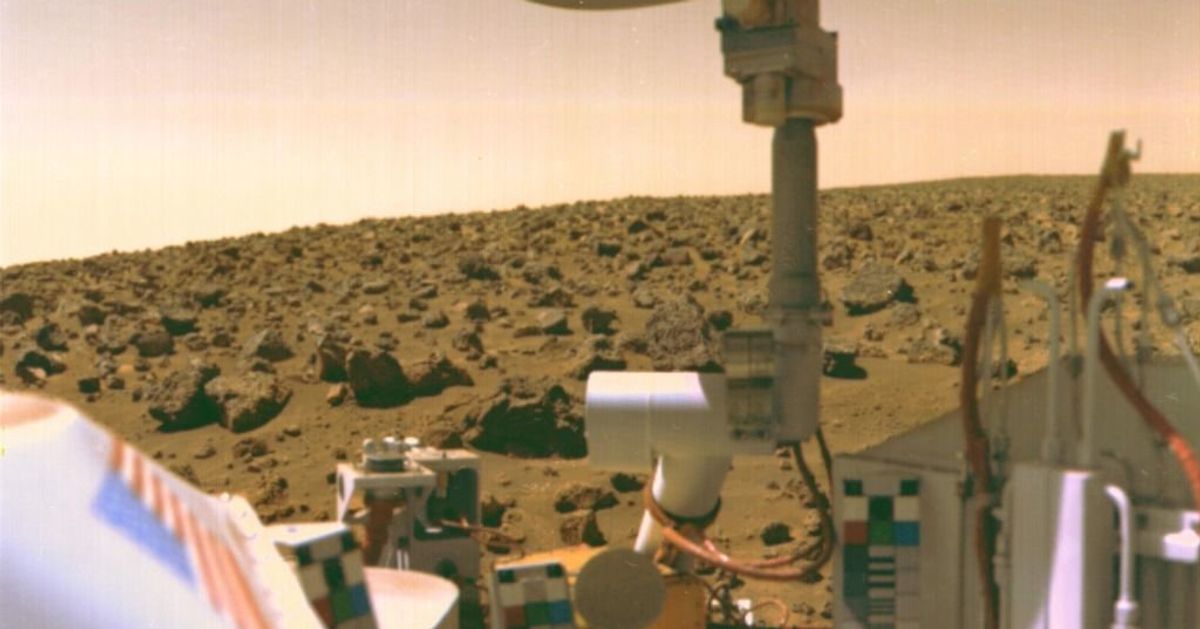
Les missions Viking apportent enfin les premières images depuis le niveau du sol. On découvre qu’il y a probablement eu de l’eau liquide dans un très lointain passé et on découvre des variations de CO2 dans l’atmosphère. Certains y voient le résultat d’une activité géologique, d’autres d’une activité microbienne.
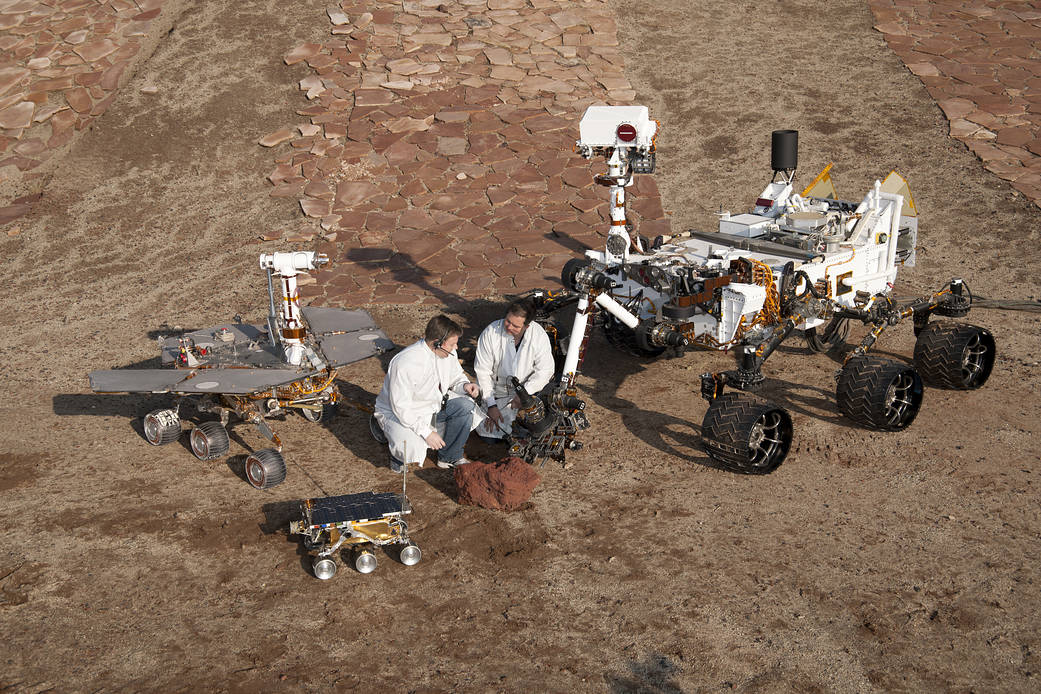
En juillet 1997, pour la première fois, Mars recevait un robot capable de se mouvoir sur le sol. Le rover Sojourner est enfermé dans l’atterrisseur Pathfinder, lui-même enfermé au milieu de tout un ensemble de ballons qui touchent le sol puis rebondissent plusieurs fois, afin de protéger sa cargaison. Le rover est un petit robot monté sur 6 roues de 10,5 kg pour 65 cm de long et 30 cm de haut. Avec 6 minutes entre le moment où l’on envoie un ordre au robot et le moment où il reçoit l’ordre, il est très difficile de le piloter à distance. Il a un mode autonome rudimentaire qui lui permet d’avancer sans attendre un retour de la Terre, soit 6+6 minutes, donc 12 mn après un éventuel blocage. Le robot avait pour mission de survivre 7 jours et il a travaillé plus de 80 jours, et s’est déplacé sur 100 mètres. Il a découvert des roches aux bords arrondis comme s’ils s’étaient entrechoqués dans une rivière. On a également vu apparaître de petits nuages dans le ciel.
Pour l’anecdote, le robot Sojourner a été mis au point par les mêmes ingénieurs qui ont créés, plus tard, les robots aspirateurs Roomba !
En janvier 2004, deux nouvelles missions américaines ont réussis à se poser avec chacune un robot bien plus important que Sojourner. Ce sont les infatigables Spirit et Opportunity. Ils devaient fonctionner avec leurs panneaux solaires pendant 3 mois et parcourir 600 mètres. Spirit a finalement fonctionné 6 ans avant de s’embourber dans une dune de sable après un parcours de presque 8 km. Et Opportunity a travaillé pendant 14 ans et a parcouru 45 km ! C’est une tempête de sable qui a encrassé ses panneaux solaires qui ont fini par lui couper toute son énergie. Bien plus gros que Sojourner, Spirit et Opportunity avait une longueur de 260 cm et une hauteur de 150 cm pour un poids total de 185 kg. Ils ont atterris grâce à une série de ballons qui ont amortis la chute avant de rebondir, comme pour Sojourner. Ces deux robots ont confirmés les traces d’écoulements d’eau par le passé, il y a 3,5 milliards d’années. L’eau a même formé des rivières, des lacs et des mers.
En 2012, c’est au tour du robot Curiosity de partir seul sur Mars. De la taille d’un gros 4×4 pour 900 kg, ce robot ne fonctionne plus avec des panneaux solaires mais avec une mini centrale nucléaire embarquée. Il a ainsi assez de puissance pour faire fonctionner de nombreux appareils, dont des fours à haute température pour analyser les roches. Le robot est conçu pour parcourir 20 km et son énergie embarquée peut le faire fonctionner pendant 14 ans, soit jusqu’en 2026.
Avec sa très lourde charge et l’envie de ne pas polluer par avance, par des bactéries terriennes, le lieu où le robot va se poser, Curiosity a atterri d’une étrange façon. Ici, pas de ballons pour faire rebondir l’engin, on commence également à réfléchir comment faire atterrir de très lourdes charges. Curiosity est enfermé dans une capsule qui le protège lors de son entrée dans l’atmosphère. Puis, un parachute se déploie. Ensuite, Curiosity est accroché à un système de propulsion qui s’allume pour ralentir encore la descente avant de se stabiliser à une vingtaine de mètres d’altitude. Le robot descendra ensuite par une grue, le Sky Crane. Lorsque le robot touchera le sol, l’appareil muni de propulseur se détachera et ira s’écraser plus loin.
Vous imaginez que les 7 minutes de cette descente, avec la complexité que cela engendre, sont d’une terreur énorme pour les ingénieurs de la NASA qui ne peuvent rien faire à une telle distance. Ils ne font que lire la télémétrie et les différentes logs qui indiquent que les étapes se sont bien passées les unes après les autres. Cette expression des « 7 minutes de terreur » est depuis restée.
Même si ce rover est américain, de nombreux appareils scientifiques embarqués sur le robot sont européens, et même français. De nombreux scientifiques toulousains collaborent sur Curiosity. D’où une certaine fierté nationale autour de ce robot.
Avec plus de 20 km déjà parcourus, Curiosity nous a apporté un lot conséquent d’images de paysages fantastiques de montagnes, de dunes, de cratères. Le robot a découvert un ancien lac, un cycle du méthane qui pourrait provenir d’une vie microbienne, des traces organique c’est à dire les briques nécessaires pour fabriquer la vie.
Et Perseverance ?
La semaine dernière, c’est au tour du robot Perseverance d’atterrir sur Mars. Ce robot est un cousin très proche de Curiosity. Ils ont la même apparence, la même façon d’atterrir mais des expériences scientifiques différentes. Curiosity devait détecter des traces de matières organiques, et il l’a fait. Perseverance va essayer d’aller plus loin et détecter des traces de vie microbienne, passées voire présentes. Comme Curiosity, de nombreux instruments scientifiques embarqués sont d’origine française et des scientifiques toulousains travaillent en étroite collaboration avec l’équipe américaine.
Le robot va prélever des échantillons qu’il va analyser dans son propre laboratoire. Et les plus intéressants seront placés dans des tubes scellés qui seront déposés sur le sol le long de son parcours.
Comme le petit Poucet ?
Exactement ! Et c’est une mission conjointe entre l’Europe et les Etats Unis qui devrait atterrir en 2026 qui fera le même parcours pour récupérer les tubes scellés avant de les renvoyer sur Terre, avec une date d’arrivée en 2031, pour une analyse beaucoup plus poussée. Cela pourrait être notre premier retour d’échantillons du sol martien, sauf si une autre mission précipite ces dates. Et le retour d’échantillons est la dernière étape avant que la NASA ne décide d’envoyer une mission habitée.
Autre particularité de cette mission, Perseverance va déposer Ingenuity, le premier hélicoptère qui volera ailleurs que sur Terre. Mars a une atmosphère bien plus mince que sur Terre, le petit hélicoptère de 2 kg devra déployer beaucoup de force pour se maintenir en vol. Ses pales devront tourner 10 fois plus vite que s’il était sur Terre. C’est pour cela qu’il ne fera que quelques vols de quelques minutes entre deux recharges par son petit panneau solaire. Ses plus longs vols ne devraient pas excéder 5 mètres d’altitude sur une distance de quelques centaines de mètres. Ingenuity n’est censé faire que 5 vols de qualifications sur un mois, pour valider le concept, avant d’être simplement abandonné sur place. Mais il ouvrira un nouveau champs de futurs vols bien plus conséquents dans les années à venir.
Tevel Aerobotics cueille les fruits

Cueillir les fruits dans un verger est une tache longue et fastidieuse. Trouver des jeunes qui veulent faire « les saisons » devient de plus en plus compliqué. N’étant pas toujours ramassés à temps, une partie des fruits finissent par pourrir et ne sont plus commercialisables. La pénurie de cueilleurs de fruits entraîne la perte d’environ 10 % des fruits d’un verger.
Tevel Aerobotics a mis au point un cueilleur de fruits automatisé. Ce n’est pas le premier, il en existe déjà qui utilisent des bras de robots pour venir chercher les fruits les uns après les autres.
Le système FAR repose sur un ensemble de drones quadricoptères qui volent en permanence au-dessus d’un chariot qui circule lentement entre les rangs. Les drones repèrent les fruits, estiment leur mûrissement et vient les ramasser si ceux-ci sont prêts à être commercialisés. Le drone se rapproche et attrape le fruit avec une pince à trois doigts puis le tourne sur lui-même pour le détacher. Enfin le robot lâche le fruit au-dessus du chariot.
Il faut charger les drones très souvent, non ?
L’ingéniosité du système FAR est que les drones possèdent une espèce de cordon ombilical qui le rejoignent au chariot. Celui-ci possède une grande batterie qui permet aux drones rattachés de pouvoir voler plusieurs heures.
Le producteur peut suivre en direct le ramassage des fruits depuis une application qui lui indique en permanence le niveau de mûrissement ou la moyenne des calibres des fruits.
FAR ne sait actuellement travailler qu’avec les pommes, les oranges et les avocats.
De plus en plus, le métier d’agriculteur se dirige vers le métier de gestionnaire.
Mojo Vision

Dans ma chronique numéro 11, je vous expliquait la différence entre la réalité virtuelle, la réalité augmentée et la réalité mixte. Je vous présentais ainsi le principe des lunettes de réalité mixte de Vuzix. Vous pouvez retrouvez cette vidéo en cliquant sur la fiche qui se trouve ici !
Mojo Vision veut aller plus loin que les lunettes de réalité mixte et travaille sur un concept de lentilles de contact pouvant afficher des informations directement sur votre regard.
Plus besoin de porter des lunettes, ces lentilles sont reliées par un système sans fil à un appareil externe, probablement un smartphone caché dans votre poche. C’est lui qui s’occupe de tous les calculs.
Les lentilles vont pourvoir afficher toutes les informations dont vous aurez besoin dans votre vie quotidienne, comme vous rappeler le nom de votre interlocuteur, aider à diagnostiquer un patient ou rendre ludique votre pratique du sport. Les lentilles intégreront différents senseurs comme des accéléromètres ou une caméra, nécessaires pour son fonctionnement.
En fin de journée, il vous faudra quitter vos lentilles et les poser sur leur socle pour recharger leur batteries.
Mojo Vision n’a présenté encore aucun prototype fonctionnel à ce jour. Mais l’entreprise a été créée par des ingénieurs de Google et Apple et ils ont le soutien de Menicon, un constructeur de lentilles de vues japonais.
A mon avis, il ne faut pas s’attendre à un tel produit, à ce point miniaturisé, commercialisé avant quelques années encore. Cela reste encore un concept qui ne demande qu’à être concrétisé.
