En Route vers le Futur revient pour une nouvelle saison. Le premier épisode permet de s’initier aux IA génératives (création de textes, d’images, de musique). La vidéos est une succession de tutoriels simples et concis. Produire une vidéo à l’aide d’IA n’est qu’un prétexte pour présenter chacune d’elles.
Dans cet épisode spécial Amiga Camping 2023 de l’émission Futurs Numériques sur Graffiti Urban Radio, Emmanuel Chopot et Frédéric Boisdron se sont entretenus avec deux intervenants de l’évènement rétro-computing de Venansault en Vendée. D’un côté Jérôme Senay, éditeur de logiciels et rédacteur en chef du magazine Boing nous raconte l’histoire de l’ordinateur Amiga. De l’autre côté, Sébastien Guebels, membre de l’association MSX Village qui promeut l’ordinateur MSX. Retour dans les années 80 de l’informatique !
Afin de préparer une future exposition de bornes d’arcade et de flippers, l’association MO5 a fait appel pour rechercher du matériel afin de proposer une exposition exhaustive.
Dans cet épisode co-présenté par Emmanuel Chopot et Frédéric Boisdron, nous nous plongeons, entre autres, dans le salon Vivatech, l’avion à hydrogène Gullhyver, la connexion à double facteur et la mobilité de demain.
Près de 300 millions de personnes sont malvoyantes à travers le monde et à côté de cela, des chercheurs travaillent dur pour ajouter la vision aux robots. Jagadish Mahendran, de l’Institut d’Intelligence Artificielle, à l’Université de Georgie, trouve cette situation plutôt … ironique.
C’est en 1930 que Guilly d’Herbemont constate que les personnes malvoyantes de son quartier parisien courent un grave danger à chaque fois qu’ils sortent de chez eux. Les véhicules motorisés prennent de plus en plus de place dans la ville. En s’inspirant des bâtons blancs des gendarmes dévoués à la circulation, elle invente la canne blanche afin d’attirer l’attention. C’est plus tard que cette canne blanche servira également à balayer son environnement pour détecter les obstacles. Une canne blanche, malgré ce que pensent les voyants, n’est pas réservée aux personne en cécité totale. Elle permet avant tout d’indiquer l’handicape et donc qu’il faut en prendre compte dans son propre déplacement. D’ailleurs, cette signalisation visuelle est également un frein pour son adoption pour certaines personnes malvoyantes qui n’ont pas forcément envie d’afficher leur handicape.
Il existe déjà des assistants utilisant la technologie pour aider les personnes malvoyantes à se déplacer dans la rue. Elles permettent à leurs porteurs de ne pas être obligé d’aller jusqu’au contact pour ressentir les obstacles.
L’Ultracanne est une canne blanche électronique qui repère les obstacles grâce aux ultra-sons. Elle détecte les obstacles qui peuvent surgir aux pieds de son utilisateur ou bien qui pourraient toucher l’utilisateur sur le haut du corps. La canne perçoit sur des distances qui se comptent jusqu’à 4 mètres. La canne prévient son utilisateur en faisant vibrer plus ou moins fort un des deux boutons situés sous le pouce. Un bouton pour les obstacles situé vers le bas et un autre pour les obstacles pouvant gêner le haut du corps.
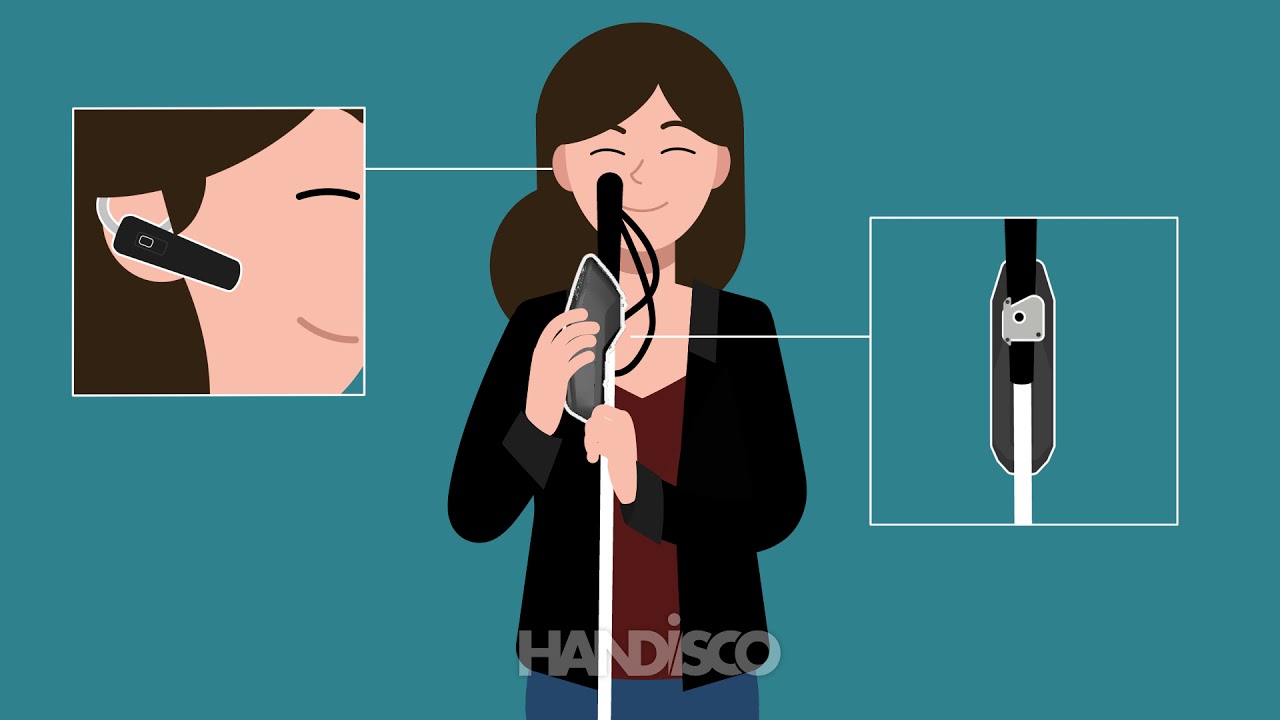
La canne blanche Sherpa utilise plutôt le son à travers une oreillette bluetooth. L’appareil fonctionne comme un assistant vocal de type Alexa ou Google Home. L’utilisateur pilote l’appareil par la voix et reçoit des informations liées à sa situation GPS. L’oreillette peut lui indiquer l’heure d’arrivée du prochain bus, la distance et l’orientation pour rejoindre une adresse, des monuments ou des rues. L’orientation est indiquée en heure. ‘Douze heure’ étant la direction pour aller vers l’avant, ‘3 heures vers la droite’, ‘9 heures vers la gauche’ et ‘6 heures’ indique qu’il faut faire demi-tour. La canne indique également à son utilisateur la couleur du feu des piétons.
La jeune startup GoSense a développé un bouclier virtuel intelligent sous la forme d’un boîtier équipés de capteurs à ultra-sous, à installer sur le manche de n’importe quelle canne blanche du marché. Elle propose à son utilisateur de percevoir son environnement avec un système audio en réalité augmentée. L’environnement est retransmit sous forme d’un son spatialisés dans un casque audio. Chaque obstacle est retranscrit par un cliquetis qui est perçu dans la direction de celui-ci, incluant sa hauteur. La vitesse du cliquetis donne la notion de distance. Cela permet de se faire une image mentale virtuelle de son environnement. La partie intelligente est sous-traitée par un smartphone caché dans la poche. L’application va également donner des informations audios sur le lieu détecté par son GPS, comme les horaires des trams et autres bus.
C’est quoi la différence entre les embouts ?
Effectivement, les cannes blanches possèdent trois type d’embouts principaux, suivant le terrain. Le plus petit est fixe, il glisse sur le sol et est parfait pour être utilisé dans un bâtiment, sur un béton lisse, un plancher ou un carrelage avec peu de relief. A l’extérieur, ces embouts ne pourront servir qu’à se signaler.
Les embouts tournants simples, que certains appellent guimauve à cause de leur forme et consistance, tournent autour de leur axe central et roulent pendant le balayage. C’est l’embout le plus utilisé car il assiste le mouvement de balayage sur des sols rugueux intérieurs comme extérieurs.
Enfin, la rolling ball est un embout tournant un peu plus gros, en forme de boule. Elle servira principalement sur des trottoirs en mauvais état, des chemins en terre ou du sable.
Au fait, cela veut dire quoi les dalles aux sol ?
Tu as raison d’ouvrir ici cette parenthèse. Vous avez dû remarquer les dalles striées que l’on perçois sur certains trottoirs, notamment près des carrefours ou à la sortie des supermarchés ? Ce sont en réalité des parcours podotactiles pour les personnes malvoyantes qui balayent ces dalles. Elles donnent des indications grâce à leur relief. Les dalles striées indiquent le sens de la marche.
Des dalles en caoutchouc ou un simple espace vide de 70 cm de côté vont indiquer un embranchement de parcours podotactiles emmenant dans des directions différentes.
Des dalles recouvertes de plots indiquent une alerte, qui invite à s’arrêter. Cela peut-être avant un passage piéton, en haut d’un escalier ou à un point remarquable, qui peut être un guichet d’information, un arrêt de transport en commun ou une borne d’appel.
Je reviens maintenant sur Jagadish Mahendran, de l’Institut d’Intelligence Artificielle, à l’Université de Georgie, dont nous avons parlé tout au début. Face à l’ironie de développer la vue aux robots alors que 285 millions de personnes sont malvoyantes sur Terre, il décide de mettre ses connaissances et la technologie à leur service.
Jagadish utilise OpenCV, une bibliothèque graphique libre développée par Intel, capable de traiter les images en temps réel. Ces images sont filmées par deux caméras avec détection de profondeur OAK-D, semblable aux capteurs Kinect de la Xbox. Celles-cis sont logée discrètement sous un vêtement au niveau de la poitrine et dans un sac banane. Un ordinateur et sa batterie d’une durée de travail de 8h sont placés dans un sac à dos équipé d’un récepteur GPS. Il récupère les données des caméras et traite leurs images en direct par une intelligence artificielle qui renvoie le résultat de son analyse, via une voix synthétique, dans une oreillette bluetooth.
Le système détecte l’ensemble des obstacles, lit les panneaux et détecte les changements de dénivellation, comme un trottoir. A un passage piéton, l’appareil détecte le couloir des piétons et guide son utilisateur dans sa direction. La petite voix va donc donner continuellement des informations sur ce qu’elle perçoit. Elle vous dira d’éviter un obstacle par la droite ou la gauche ou de baisser la tête pour éviter un feuillage. Ce sont des messages très courts. Sur notre exemple de feuillages au niveau de la tête, la voix va juste signaler « top front » ce qui signifie qu’un obstacle est devant en haut. Il faudra donc baisser la tête.
Dans la rue, l’intelligence artificielle pourra, suite à une demande vocale de votre part, vous décrire ce qu’elle voit. La reconnaissance des formes va entrer en action et vous décrire les obstacles, les feux de signalisation, les parcours podotactiles, les personnes, animaux ou véhicules sur votre chemin. Chaque élément est indiqué avec sa direction en heures.
Si vous lui demandez votre localisation GPS, il vous indiquera votre adresse géographique et pourra vous guider à un lieu précis.
Ce système est encore en cours de développement et est testé dans la banlieue de Los Angeles en Californie. Le but est ici de se passer d’un chien d’aveugle et même d’une canne blanche. Il se veut discret afin qu’à l’avenir ses utilisateurs n’aient plus besoin d’être particulièrement visibles pour se déplacer en toute sécurité.
Ces recherches ne déboucheront probablement pas d’un produit avant quelques années encore. La canne blanche a encore un peu de répits avant de partir à la retraite.
Peut-être rêvez-vous de monter assez haut afin de voir la courbure de la Terre ? Le tourisme spatial qui devrait émerger dans les prochains mois avec la petite navette SpaceShipTwo de Virgin Galactic, la capsule NewShepard de Blue Origin ou les vols dans la Station Spatiale Internationale avec Space Adventure qui seront proposés à des tarifs très élevés. 250 000 € pour un saut de puce et plusieurs millions pour un séjour en orbite.
Space Perspective, une entreprise américaine, propose une nouvelle voie pour un tarif un peu moins élevé. Pour la moitié de la valeur d’une place dans SpaceShipTwo ou New Shepard, soit environ 120 000 €, vous pourrez vous envoler dans une nacelle pressurisée attachée à un ballon stratosphérique jusqu’à une altitude de 30 km, assez pour voir distinctement la courbure de la Terre et avoir une vue proche d’un passager d’une mission spatiale.
La nacelle, appelée Neptune, peut embarquer 8 personnes, elle contient un bar et des toilettes et offre une vue panoramique sur notre planète. Après le décollage depuis la Floride, le ballon mettra deux heures pour atteindre les 30 km d’altitude. Vous resterez ensuite pendant 2 heures à admirer notre planète et sa fragilité, dans les hautes couches de l’atmosphère en dérivant en direction de l’océan atlantique. Puis vous redescendrez pendant 2 heures supplémentaires jusqu’à l’océan où un bateau vous récupérera.
Space Perspective prévoit que, parmi sa clientèle, certains voudront en profiter pour y célébrer des évènements de groupes comme des mariages ou des concerts. Il est également possible que Neptune soit utilisé de temps en temps pour des études scientifiques sur l’atmosphère, le climat ou la météorologie.
Pas de soucis pour vos réseaux, vous pourrez accéder à Internet à tout moment et donc aux réseaux sociaux pour vous pavaner avec la Terre en fond.
Le tarif est moitié moindre que Virgin Galactic ou Blue Origin, mais Neptune ne va pas jusqu’à l’espace situé à 100 km d’altitude, et encore moins en orbite. Vous ne pourrez donc pas goûter aux joies de l’apesanteur, vous aurez toujours les pieds au sol. Je dirais même que si vous ressentez une apesanteur, c’est qu’il y a un problème, c’est que vous tombez, tout simplement ! Par contre, ce voyage de 6 heures en tout est bien plus long que les sauts de puces spatiaux qui se déroulent en moins de 3 heures pour Virgin Galactic et en moins de 15 mn pour Blue Origin, les deux avec seulement quelques minutes réellement dans l’espace.
L’entreprise a fait une dernière levée de fonds de 7 millions de dollars en décembre dernier. Le premier vol devrait avoir lieu dans les prochains mois avec une nacelle vide et non pressurisée afin de valider le concept. Les vols commerciaux pourraient commencer à partir de 2024.
Peut-être évitez-vous de regarder le mini-rayon bonbons et chocolats que l’on trouve à l’entrée des caisses de supermarchés pour ne pas être tentés de prendre une barre chocolatée. La société Mars, qui produit de nombreuses confiseries comme les barres Mars ou les M&Ms a bien compris que vous aviez appris à ne pas vous faire avoir par la tentation.
C’est pourquoi elle teste un robot pour vous appâter à l’intérieur même des magasins. Le robot Smiley est dérivé des robots du constructeur Relay de Savioke, qui s’occupe de petites livraisons dans les hôtels ou des entreprises.
Je sens que ce robot Smiley va vite devenir énervant dans les magasins car celui-ci suit les clients et les invite à se servir d’un paquet de confiserie dans l’étalage qu’il transporte.
Vendre des bonbons n’est pas sa fonction principale. En réalité, il est surtout là pour étudier les déplacements et habitudes des clients dans le magasin. Ils proposent ainsi aux propriétaires un moyen d’améliorer leur magasin pour coller au mieux aux habitudes de ses clients.
Le robot Smiley est pour le moment en période de test dans un magasin alimentaire ShopRite à New-York.
Pas sûr que ces étalages mobiles donnent une bonne image du robot, surtout si on imagine un magasin où plusieurs robots de ce type seraient déployés. C’est légèrement anxiogène, même pour moi.
Avez-vous déjà ressenti un malaise en voyant un robot recouvert d’une peau synthétique ? Quel sentiment ce robot de télé-présence, le Telenoid, vous procure t-il ? Une peur ? Un dégoût ? Un malaise ? Hé bien, c’est parfaitement normal ! Vous êtes entré dans l’Uncanny Valley, ou vallée de l’étrange !
La vallée de l’étrange est une théorie qui met en évidence un malaise que l’on perçoit naturellement face à ce qui ressemble à un être vivant, tout en ne l’étant pas.
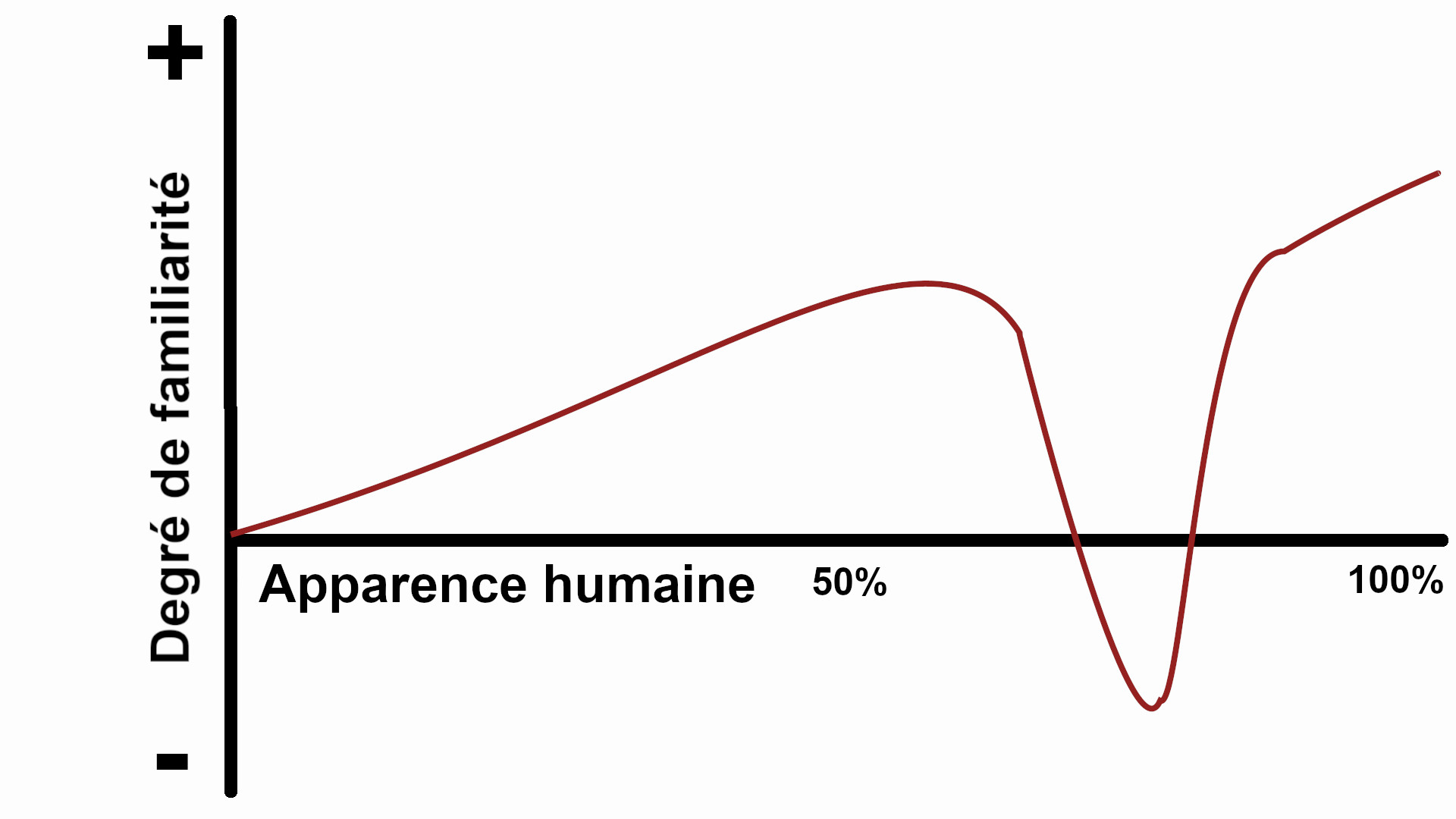
Pour bien comprendre, nous allons tracer un graphique. En abscisse, nous traçons une droite représentant le degré de ressemblance d’une apparence humaine, ou du moins animale. Tout à gauche, nous avons le grille-pain ou la représentation d’un caillou. C’est à dire, quelque chose de totalement inanimé, en dehors de la tartine éjectée bien sûr. Plus nous allons sur la droite et plus cet objet ou cette représentation ressemble à un humain, ou un animal.
Pour l’ordonnée, nous allons schématiser notre degré de familiarité. Plus nous allons vers en haut, plus nous ressentons une familiarité, une empathie positive pour l’objet que nous avons en face de nous. Au contraire, plus nous allons vers le bas, plus nous ressentons un dégoût, une peur, voire une angoisse face à cet objet.
D’une manière générale, plus un objet prend un aspect humanisé, plus nous nous projetons dans celui-ci. Nous développons une empathie. Nous lui prêtons une humanité.
Plus un robot ressemble à un humain, plus nous imaginons que celui-ci possède une intelligence artificielle évoluée. Ce qui est totalement faux en vérité. Un assistant vocal comme Alexa, Siri ou Google Home sont bien souvent plus aptes à tenir une conversation avec vous qu’un robot à apparence humaine. C’est dire !!
C’est dans cet esprit que de nombreux ingénieurs veulent développer des robots compagnons reprenant les traits d’un être vivant. Plus humanisé il sera, plus nous pourrions prendre confiance en lui, car nous nous plaçons en empathie avec lui.
Graphique : Vallée de l’Etrange.
Bref, traçons une ligne représentant cette évolution de l’empathie telle que l’on pourrait l’imaginer.
Sauf que….
En réalité, la ligne ressemblerait un peu plus à ça !
Voyez ce grand creux dans la ligne, ressemblant à une vallée entre deux montagnes ?
La vallée de l’étrange !
Exactement, c’est l’Uncanny Valley ou Vallée de l’étrange en français.
D’où vient cette cassure ?
Pendant des siècles, même des millénaires d’évolution de nos machines, elles ont suivies le début de la courbe. Même arrivés au début de l’ère du robot, les premiers bras industriels étaient très loin de ressembler à des humains. Leurs gestes, très mécaniques, étaient loin de nous faire peur. Sauf si l’on avait peur de se prendre un coups, bien sûr.
Mais ces dernières années, des robots ressemblant à des humains, des insectes, des chiens ou des chats, ont commencés à se rapprocher du haut de la première colline. De plus, ces robots ont commencés à avoir des mouvements beaucoup plus fluides. Et un premier début de malaise est apparu chez les personnes les observants.
Pourquoi ?
Tout simplement, ces robots ont une apparence que notre cerveau associe de façon totalement inconsciente à un être vivant. Or, toujours ce sacré cerveau, s’aperçoit qu’il y a en réalité un décalage avec ce qu’il attend d’un être vivant. Cela ressemble mais pas complètement. Ses mouvements sont fluides, mais pas complètement. Des détails coupent l’illusion. Et notre cerveau se met en alerte !
Toujours inconsciemment, notre cerveau se met à interpréter ce qu’il voit. L’être devant lui est-il malade ? Devons-nous fuir pour ne pas être contaminé ? Notre cerveau interprète exactement comme s’il était face à un cadavre. C’est pourquoi, inconsciemment, même si l’on est ouvert à la technologie, nous avons naturellement peur d’un robot qui sera recouvert d’une peau synthétique comme cet androïde, ou qui aura des mouvements d’une fluidité proche d’un animal comme le Bigdog.
Pour mieux comprendre, je vais placer quelques exemples sur notre courbe. Ici, au tout début, nous pouvons mettre le bras robot industriel. Ses gestes et son apparence n’ont absolument aucun lien avec un être vivant. Ses mouvements sont rythmés avec la tâche qu’il a à accomplir, purement mécanique.
En allant vers la droite, nous allons placer des robots à apparence de plus en plus humanoïde, ou du moins animale. C’est ainsi que l’on peut placer ici, les peluches robotisés. Elles possèdent très peu de mouvements. Elles sont mignonnes dans leur apparence et leurs jappements, mais elles ne font l’illusion que si l’on a envie d’entrer dans leur jeu. Très vite, leur partie purement mécanique se devine sous la peluche.
Un peu plus loin encore, nous trouvons les robots humanoïdes de type Nao, Pepper ou Robi. Leurs gestes commencent à gagner en fluidité. Leur apparence se rapproche encore un peu plus de l’humain. En plus, ils parlent, voire tentent de suivre une conversation. Mais leur coque plastique et leurs grands yeux les font classer par notre cerveau comme des machines. Impressionnantes, mais encore des machines. Ces robots vont pourtant exprimer ce qui pourrait ressembler à des émotions, comme la peur, le rire ou la compassion. Mais ces émotions, bien évidemment scriptées, ne sont retransmises que par des jeux de lumière ou des gestes comportementaux reproduit sans la moindre créativité. La plupart des robots, surtout au niveau grand public, ne dépassent pas ce niveau de réalisme pour le moment.
Pour l’anecdote, Aldebaran Robotics, le constructeur original de Nao, a longtemps hésité à afficher ce qui peut ressembler à des yeux. Justement pour ne pas basculer dans la vallée de l’étrange.En réalité, les caméras sont situées dans ce qui pourrait ressembler à la bouche et au niveau du front. Au niveau des yeux, ce sont des récepteurs infrarouges.
Quand aux robots Spot et Atlas de Boston Dynamics, ils entrent dans la vallée de l’étrange. S’ils ne bougent pas, ils ressemblent en tout point à des machines, mais ce sont leurs mouvements fluides et leurs comportements face à une perte d’équilibre ou une chute qui leur donne un côté animal, voire qui leur donne un aspect dangereux. Les films et séries de science-fiction à la Terminator ou Black Mirror nous confortent dans une une impression de danger. Par contre, à l’inverse, nous développons de l’empathie pour eux grâce à leur forme humanoïde ou proche du chien. Lorsque les ingénieurs testent les réflexes de leurs robots, en les poussant pour les faire tomber ou faire tomber ce qu’ils portent, les gens y voient inconsciemment de la violence. Ils projettent une personnalité dans ces machines, qui finalement ne sont pas plus évoluées qu’un grille pain au niveau des sentiments. Cela reste des machines, à apparence vivante, mais de simples machines.
Si, par hasard, vous voulez en savoir plus sur les robots de Boston Dynamics, vous pouvez suivre ma vidéo qui leur est consacrée dans cette fiche !
Depuis quelques années, fleurissent les robots recouverts de peau synthétique, recherchant au maximum à nous ressembler. Sur une photo, nous pourrions nous faire avoir, mais dès que le robot est animé, notre cerveau capte des détails qui le choque. Les mouvements qui ne sont pas naturels, qui sont répétés et pas toujours très fluides. Des mains souvent très grosses, et sans vie, par rapport au reste du corps. Des mouvements de cheveux saccadés. Un visage trop parfait, les pores de la peau, un léger duvet sur la peau du visage, un regard perdu, un sourire forcé, une peau plissée ou au contraire trop étirée, une position ou démarche qui manque de naturel. Tous ces détails donnent un aspect malade, voire cadavérique. Ils créent une dissonance de l’empathie.
Notre cerveau nous alerte inconsciemment : partez, fuyez !
D’où une peur, ou du moins un malaise qui s’installe en voyant ces robots bouger. Nous sommes bien au creux de la vallée de l’étrange.
Comment en sortir alors ?
Le seul moyen est :
soit de revenir à un aspect plus plastique, avec de grands yeux mignons façon manga, ce qui est le choix de la plupart des constructeurs de robots de service,
soit pousser la ressemblance au maximum jusqu’à ce que notre cerveau ne voit plus la différence du tout. Même si consciemment, nous sommes au courant que nous avons un robot devant nous, si notre inconscient ne fait plus la différence, nous seront sortis de la vallée de l’étrange.
Aujourd’hui, aucun robot n’a réussi à sortir de la vallée de l’étrange. Nous en sommes même encore très loin. Il faudra probablement encore quelques dizaines d’années pour avoir des robots mimant parfaitement notre humanité sur le plan physique.
Cela se limite aux robots ?
Dans les faits, ce malaise dépasse largement le cadre des robots. Dès 1906, le psychiatre berlinois Ernst Jentsch parle de la notion d’ « inquiétante étrangeté ». Il décrit que les masques ou les maquillages de clowns donnent un air inquiétant à ceux qui les portent, puisque notre cerveau n’arrive pas à interpréter correctement les émotions de leur porteur. D’ailleurs, certaines personnes sont touchées par ce phénomène à de très haut niveaux, c’est la coulrophobie, c’est à dire la phobie des clowns. D’autres ont la phobie des poupées, particulièrement des poupées de porcelaine, la pédiophobie.
Freud va continuer, plus tard, à théoriser cela en décrivant de légers décalages entre une reproduction du vivant et la réalité, laissant apparaître des détails imperceptibles, créant le malaise.
Mais c’est le roboticien japonais Masahiro Mori, en 1970, qui publie un article scientifique intitulé Uncanny Valley qui décrit parfaitement la vallée de l’étrange, telle qu’on la connaît aujourd’hui.
Depuis, nous avons découvert qu’en plus des masques, des poupées ou des robots, nous avions le même problème avec les images de synthèse dans les films et les jeux vidéos. Tant que le dessin reste cartoon, nous ne percevons aucun malaise. Mais si l’on tente de se rapprocher de la réalité, nous pouvons de nouveau entrer dans la vallée de l’étrange. Pensez notamment à la comédie musicale Cats ou le film d’aventure « Le Retour de la Momie », où Dwayne Johnson incarne le Roi Scorpion. Les images des effets spéciaux étaient sensiblement ratés et la tête de The Rock manquait cruellement de naturel. Nous tombons de nouveau dans les mêmes travers que la vallée de l’étrange. Le même problème apparaît dans le premier Toy Story. Rien à dire sur les jouets, mais par contre les personnages humains d’Andy où du terrible voisin Sid, voulant être un peu plus réaliste, peuvent provoquer un dégoût, un malaise.
C’est pareil pour tout le monde ?
Pas du tout. Chaque personne perçoit cette vallée de l’étrange différemment. Elle peut-être très prononcée ou au contraire inexistante. Elle peut être plus à gauche ou plus à droite. Un joueur de jeux vidéo des années 90 est habitué à voir des personnages plus ou moins réalistes en 3D et ne s’émeut que très peu sur le niveau de réussite d’un personnage en images de synthèse dans un film. Cela va peut le choquer sur la qualité graphique mais pas forcément sur un éventuel malaise.
En Europe, nous avons une culture judéo-chrétienne. Chez les croyants, seuls les humains ont une âme. Même les animaux n’en ont pas, alors un objet… Même chez les athées, cette notion est restée ancrée dans la culture. Nous sommes donc bien plus sujet à la vallée de l’étrange qu’en Asie. Là-bas, la culture est bien plus proche de l’animisme, qui projette des esprits sur chaque animaux et même chaque objets. Donc une machine peut tout à fait intégrer quelque chose qui se rapproche de la notion de l’âme. Une machine douée de mouvements ou d’une apparence humanoïde les choque bien moins que dans la culture européenne.
A l’avenir, si la vue d’un robot vous fait peur, vous saurez pourquoi !
Le 30 juin 2012, le navire RV Flip, de 108 mètres de long et construit en 1962, subit d’importants dommages qui laissent remplir ses cales situées au centre du navire en eau salée. Dans cette horreur, le navire qui a tourné ses images n’a même pas pris la peine d’aller chercher les derniers passagers à bord. Un véritable drame pour la marine.
Ou pas ! (caméra approchée)
L’eau de mer est effectivement entrée dans le navire. Mais c’était totalement prévu ! RV Flip est un navire vertical. En gros, il est remorqué par un autre navire jusqu’à destination. Ensuite, des ballast semblables aux sous-marins s’ouvrent pour se remplir en eau. L’avant étant lesté par du béton, celui-ci finit par prendre la direction des fonds marins. Mais le ballast central contient juste ce qu’il faut pour garantir l’équilibre afin que la partie arrière se retrouve toujours au-dessus du niveau de la mer, qu’importe la hauteur des vagues.
A l’origine, le RV Flip a été construit par les Etats-Unis pour écouter les fonds marins pendant la guerre froide. Avec un tirant d’eau de 80 mètres de profondeur, l’écoute n’était plus parasitée par les bruits de la surface. A la fin de la guerre froide, le navire a été réaffecté à l’Institut Océanographique californien pour de la recherche scientifique.
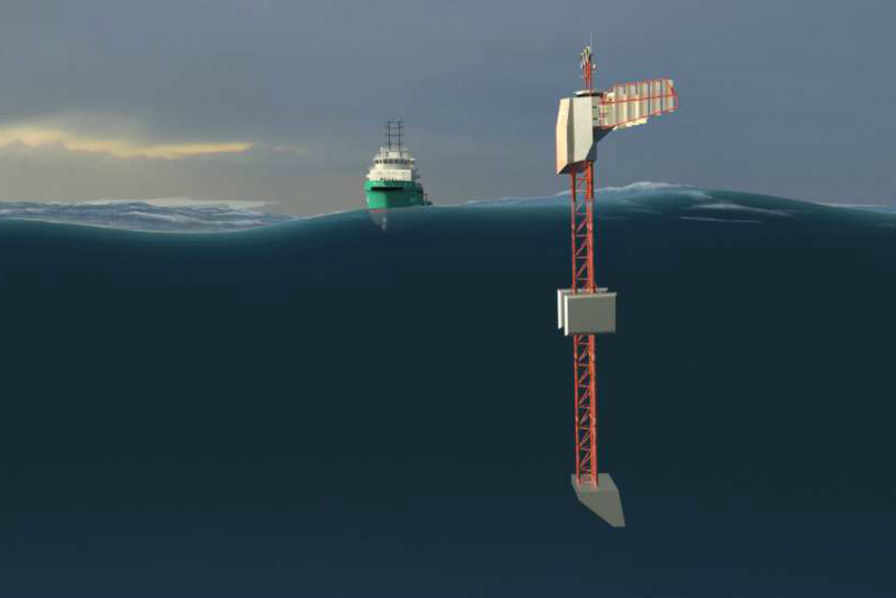
Le célèbre explorateur français Jean-Louis Étienne, qui a notamment été le premier à atteindre le pôle Nord en solitaire en 1986, a pour projet de construire son propre navire d’étude océanographique sur le même principe que le RV Flip, sous le nom Polar Pod.
Légèrement plus petit, avec ses 90 mètres, le Polar Pod est surtout plus simple dans sa construction. Il consiste en un ensemble de tubes d’aciers, avec des ballast aux centre et un lest en béton de 150 tonnes à l’avant. A l’arrière, se trouve une nacelle contenant 3 étages. On y trouve des laboratoires, une salle informatique et les habitations.
Après avoir testé une maquette dans un bassin nantais pour tester sa flottabilité et les contraintes en cas de forte houle il y a quelques années, le projet Polar Pod est en train de lancer un appel d’offre pour sa construction qui devrait démarrer l’année prochaine, pour une durée d’environ 7 mois. Les premiers campagnes d’essais sont prévues pour 2023.
Entre 2024 et 2026, le Polar Pod partira pour une mission de 3 ans avec 7 passagers, 3 marins et 4 scientifiques, à bords se relayant tous les 3 mois. Il devrait faire deux tours du monde, emporté par les courants marins de l’océan austral entourant l’antarctique, dans ce que l’on appelle les 40e Rugissants. Avançant très lentement, il pourra se faire aider par deux voiles qui pourront être déployées sur le flanc de la nacelle.
Quelle sera sa mission ?
Plusieurs missions sont prévues lors de ces 3 ans. Il va étudier les conséquences de nos rejets de CO2 sur l’océan Austral et sa capacité à l’absorber. Il aura une mission de recensement de la faune marine, du plancton microscopique aux grands mammifères marins. Le Polar Pod va également aider à la calibration des mesures satellites en validant les données reçues afin qu’elles collent au mieux à la réalité. Enfin, le navire mesurera la pollution provenant des micro-plastiques ainsi que la pollution sonore provenant de notre activité.
Tout le nouveau programme lunaire habité de la NASA repose sur la fusée Space Launch System, la SLS. Cette fusée géante reprend une bonne partie des caractéristiques de la fusée emblématique Saturn V qui a transporté les 6 missions lunaires habitées Apollo entre 1969 et 1972. Afin de réduire les coûts de développement, elle repose sur les technologies éprouvées par les anciennes navettes spatiales Shuttle qui ont volées entre 1981 et 2011.
Le nouveau programme habité lunaire, Artemis, devrait démarrer officiellement en novembre prochain (fiche vers HS) avec le décollage de la mission Artemis 1. Ce sera le vol inaugural de cette nouvelle fusée géante, dans sa version block 1, de 98 mètres de haut. Ce premier vol sera une répétition générale, à vide, sans astronautes, de la mission suivante Artemis 2. Elle transportera le nouveau vaisseau Orion, dont le module de service est d’origine européenne, jusqu’à une orbite de transfert. Ensuite, Orion sera propulsé en direction de la Lune. Le vaisseau en fera deux fois le tour, avec deux phases à basse altitude, 100 km du sol lunaire, et une, au contraire, très éloignée à 60 000 km.
Pourquoi si éloigné ?
Artemis 1 est une répétition générale d’Artemis 2 qui aura lieu en juillet 2023. Celle-ci sera habitée par 3 astronautes États-uniens ainsi qu’un astronaute canadien. Elle fera en gros la même chose que la mission Apollo 8 en 1968. Pour se démarquer d’Apollo 8, Artemis 2 se devait de faire une première. Et ce sera simplement la mission habitée la plus éloignée de la Terre de l’histoire.
Si aujourd’hui on parle de la fusée SLS qui emportera les missions Artemis, c’est parce qu’elle a enfin complété la validation de ses tests du Green Run. Le18 mars dernier, la fusée qui servira pour Artemis 1 a été mise en condition de vol en démarrant ses moteurs pendant plus de 8 minutes. Les 4 moteurs RS-25 ont parfaitement fonctionné, contrairement aux tests effectués en janvier dernier qui se sont arrêtés prématurément.
Désormais, la SLS est considérée comme apte à voler. Mais il reste des différences entre un tir statique au sol et la réalité d’un lancer. Nous aurons donc la réponse finale en novembre prochain, s’il n’y a pas de report.
Après s’être appelé Avelia Horizon, puis TGV du futur ou TGV 20 20, la France va connaître sa cinquième génération de Train à Grande Vitesse, sous le nom de TGV M.
C’est en 2015 que la SNCF lance un appel d’offre pour renouveler son parc ferroviaire. Elle désire des rames plus modernes, pouvant transporter plus de monde, tout en étant plus écologique et moins coûteux à l’achat et à la maintenance.
Alstom, constructeur historique des TGV depuis les premiers prototypes de 1971, a repris le flambeau. Mais pas question de se reposer sur ses lauriers, en septembre 2016, le groupe a repris ses planches à dessin et a commencé son nouveau modèle à partir d’une feuille blanche. Ce sont ainsi 2 000 personnes qui se sont affairées pour développer le concept du TGV M.
Que veut dire le M ?
C’est le M de Modulaire. Tout d’abord les rames comportent toujours leurs deux motrices, l’une à l’avant, l’autre à l’arrière, avec la possibilité d’inverser le sens de la marche. Mais désormais, chaque rame peut modifier son nombre de voitures, entre 5 et 9, suivant les besoin de la ligne.
Ensuite, chaque voiture est également modulaire. En moins d’une journée, une voiture peut entièrement être réaménagée, pour accueillir plus de sièges, plus de bagages, ou même transformer une voiture de seconde classe en première classe ou inversement.
Les anciennes rames de TGV Duplex, sur deux niveaux, pouvaient transporter jusqu’à 509 passagers. Le TGV M va monter jusqu’à 740 places, soit une augmentation de 45 %. Mais cela reste moins que les 900 passagers de l’Eurostar, utilisant des trains allemands Velaro e320.
Le TGV est français ?
Le nouveau TGV M est 100 % français. Il est fabriqué actuellement à Belfort et à La Rochelle.
Tata Ginette pourra monter dedans ?
Le TGV M a été pensé pour être plus accessible aux personnes à mobilité réduite. Tata Ginette et son fauteuil roulant pourront se déplacer dans ce TGV au rez de chaussée ou à l’étage, en utilisant un petit ascenseur. Durant la conception du TGV M, des associations de voyageurs et de personnes à mobilité réduites ont testées des maquettes 3D à l’aide de la réalité virtuelle.
Parmi les conforts améliorés, vous ne retrouverez plus la climatisation situé sous votre coude, mais au-dessus de vous. De plus, les vitres froides, c’est fini, puisqu’une meilleur isolation thermique a été apportée. D’ailleurs, les fenêtres seront légèrement plus spacieuses, de 10 %, pour vous offrir une meilleur vue et un meilleur éclairage. Et lorsque le soleil est couché, vous aurez droit à un éclairage modulable.
Très important ! Je pourrais regarder Netflix dans ce train ?
Oui, ce TGV M sera connecté, avec un vrai réseau Internet à bord !
Il va être plus cher alors ?
En réalité, non. C’était une demande de l’appel d’offre originale. Une rame de TGV M coûterait 20 % de moins qu’une rame de TGV classique. Et ce, pour plusieurs raisons. Tout d’abord, les pièces ont été standardisées. Elles sont désormais interchangeables avec les autres trains du groupes, comme le Transilien qui dessert la banlieue parisienne. Ces pièces standard permettent de travailler sur de plus grand volumes, et donc développer une économie d’échelle.
Ensuite, les coûts de la maintenance vont également baisser de 30 % puisque chaque train comporte 30 % moins de pièces que dans les précédents TGV, donc 30 % moins de pièces pouvant tomber en panne. De plus, comme dans les avions, des capteurs d’usure seront disséminés sur le train. Ils enverront en temps réel l’état des pièces au poste de pilotage. Cela permettra de faire de la télé-réparation quand c’est possible mais surtout de déterminer à l’avance l’état d’usure des pièces afin de les changer avant leur panne. Jusque là, les pièces étaient systématiquement changées régulièrement, tous les 8 ans, quelque soit leur niveau d’usure. Maintenant, chaque pièce ne sera changée que si elle était réellement en fin de vie.
Le TGV M va également gagner en consommation. L’aérodynamisme a été revu et son nez entrera plus facilement dans l’air. Alstom pense que celui-ci permettrait de gagner 20 % sur la consommation d’un TGV classique. Et comme les voitures électriques, lorsque le train freine, le TGV renverra l’énergie gagnée vers le caténaire, c’est à dire le câble électrique qui lui apporte l’énergie depuis l’extérieur le reste du temps.
Jusque là, non ! Mais finalement, ce nouveau TGV M comportera deux kits de batteries, permettant à la rame de continuer à avancer sur 40 km en cas de panne électrique dans les caténaires. En réalité, cela a surtout été pensé pour permettre à un TGV bloqué dans un tunnel, pendant une panne du réseau électrique, de pouvoir, au moins, en sortir.
Enfin, un dernier point permet de réduire les coûts de ce TGV M. Le système de pilotage intègre un système d’écoconduite, à la manière des boutons « Eco » des voitures modernes. Une fois enclenché, votre véhicule a moins de pèche mais vous consommez moins.
Et l’environnement ?
Le TGV M a été pensé pour être plus écologique, puisque 97 % d’une rame est recyclable. Son empreinte carbone est de 32 % de moins que les TGV actuels.
Et c’est pour quand ?
En 2018, ce sont 100 première rames qui ont été commandées pour un total de 2,7 milliards d’Euros. Les premières rames pourraient faire leurs premiers tests vers l’été de cette année. Et leur mise en service devrait avoir lieu vers juin 2024, pour accueillir les Jeux de Paris. Alstom devra livrer l’intégralité des 100 premières rames jusqu’en 2031. Et la SNCF a déjà posé une option sur 100 rames supplémentaires qui pourrait devenir une commande ferme à la fin de la décennie.
Et à quand un TGV plus rapide ?
Ce n’est pour le moment pas du tout à l’ordre du jour. Ces nouveaux TGV M seront là pour longtemps maintenant. Leur durée de vie est estimée à 30 / 35 ans. Ils seront probablement encore en service en 2070.
Attention, ces TGV ne seront pas des escargots non plus, ils rouleront à 320 Km/h comme les TGV actuels. Ils seraient capables d’atteindre 360 km/h en vitesse de croisière, mais ce serait au détriment de lourds travaux d’aménagements des voies et une usure des pièces plus rapide. Tout ça pour gagner 5 à 8 mn sur les plus longues lignes. La SNCF n’en voit pas l’intérêt.
Mais c’est vrai, qu’à côté, les Maglev, trains à substantation magnétique commencent à se multiplier un peu partout. En Chine, un Maglev vient d’être enregistré à la vitesse de 620 km/h lors de tests. Même si sa vitesse de croisière est moindre, elle atteint quand même 431 km/h.
Et que dire de l’hyperloop, ces trains à substantation magnétique à l’intérieur de tubes à vide. Ici, on parle de vitesse théorique de 1 150 km/h ! D’ailleurs, pour en savoir plus, je vous invite à revoir ma chronique numéro 3, disponible ici dans mes fiches !
La Station Spatiale Internationale, ou ISS commence à avoir quelques années maintenant. Cette station peut abriter 6 astronautes et fait la taille d’un stade de football si l’on compte également les panneaux solaires. Elle avait été d’abord conçue pour être exploitée entre 1998, année du début de son assemblage, et 2024. Les modules commencent à être obsolètes et leur maintenance sont d’un coût élevé. Pour le moment, l’ISS a gagné un sursis jusqu’à 2028.
C’est pourquoi, d’autres projets de stations spatiales s’apprêtent à prendre le relai, même si rien n’a encore été décidé sur le sort de l’ISS après 2028. Les américains et les européens vont déployer une nouvelle station spatiale, mais en orbite lunaire cette fois-ci, servant d’escale avant de déposer des astronautes sur le sol lunaire. La LOPG, ou Gateway devrait commencer à être assemblée à partir de 2024. Plus proche de nous, la Chine devrait commencer l’assemblage de Tiangong 3, leur propre station spatiale nationale dans les prochaines semaines.
Et tout ça, c’est sans compter les multiples projets de stations spatiales privées. Jusque là, elles étaient vouées à l’échec, car le marché était bien trop restreint. Mais aujourd’hui, ce sont des sociétés privées qui emportent les astronautes à bord de l’ISS. Ce sont des sociétés privées qui vont fabriquer les éléments de la station lunaire Gateway. Un module, gonflable, de l’ISS est déjà un module privée. Si l’ISS reste en place quelques années de plus, elle pourrait être exploitée à titre privée, plusieurs projets sont à l’étude.
Quand on dit privé, on ne parle pas uniquement d’allemands en shorts. Tout simplement, chaque laboratoire scientifique, chaque pays n’aura pas besoin d’avoir un programme spatial complet pour pouvoir accéder à l’espace. Il suffira de s’offrir un vol à bord d’une fusée SpaceX et de quelques jours ou semaines à bord d’une de ces stations privées pour mener à bien leurs études scientifiques.
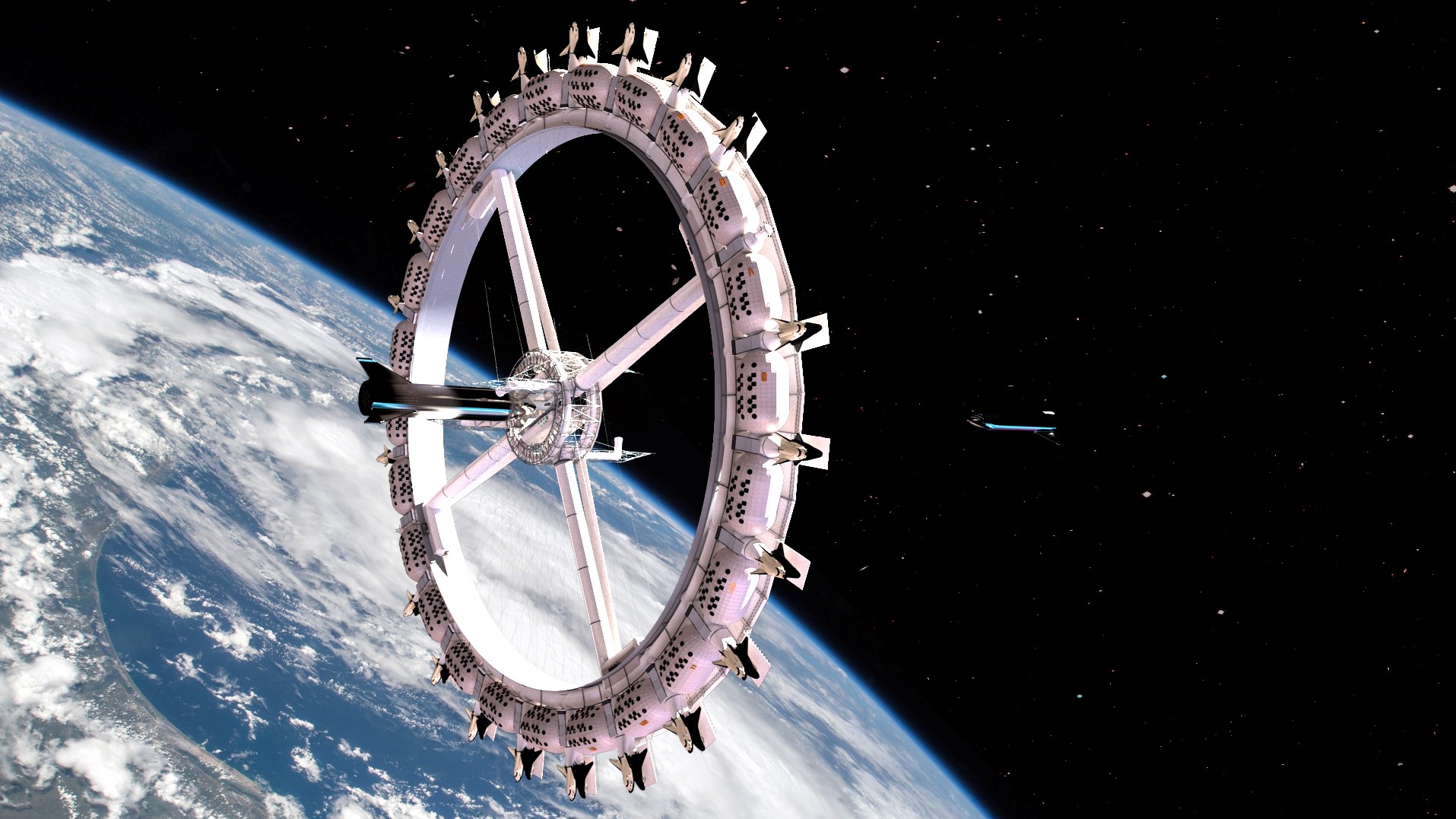
Et parmi ces projets, un concept très ambitieux a été présenté, Voyager. Pour le moment, je ne lui accorde que très peu de crédits. Le projet semble trop ambitieux, trop proche du design d’un film de science fiction pour être pris au sérieux. Mais, après tout, comme lorsque SpaceX a annonce le projet Big Fucking Rocket, devenu désormais Starship.
Voyager n’est pas né d’une entreprise, mais d’une fondation. Bon… Déjà… Cela veut dire, aucun moyens. Voyager reprend les projets de stations spatiales, en forme de roue, des années 50. En tournant sur elle-même, elle permet de créer une pesanteur artificielle de 30 % et évite ainsi la décalcification des os et la perte de masse musculaire. Tout comme dans 2001, l’Odyssée de l’Espace de Stanley Kubrick qui propose des bâtiments spatiaux de ce type, la partie centrale n’est pas sous pesanteur artificielle, et vous pouvez donc continuer à y voler.
La roue ferait 200 mètres de diamètre. Elle offrirai 51 000 m³ de surface habitable, pouvant héberger jusqu’à 440 passagers dans 24 modules d’habitation de 12 par 20 mètres. Ces modules seraient ensuite divisés en chambres ou suites suivant les budgets. Des zones sportives, de restauration ou de loisirs seraient également incluses.
Les liaisons seraient faites au niveau du noyau central qui accueillerait une espèce de spatioport. Mais pour plus de sécurité,chaque module aurait accès à une navette de secours de type Dream Chaser pour revenir sur Terre.
D’après la fondation Gateway, porteuse du projet, il suffirait de 40 vols de Starship de SpaceX pour la construire, le tout pour un coût de 60 milliards de dollars, soit deux fois moins que l’ISS. La fondation espère pouvoir commencer son assemblage en 2025.
Même si je pense que c’est encore un peu tôt pour qu’un tel projet puisse voir le jour réellement, je pense qu’il a au moins le mérite de nous montrer à quoi pourrait ressembler une station spatiale privée dans 50 ou même plutôt 100 ans.
J’espère me tromper dans mon estimation, et voir cela dès notre décennie. Mais, j’ai beau être un grand rêveur…
Pour finir, voici l’arrivée sur la plateforme de financement participatif, Kickstarter, de Bird Buddy. C’est une mangeoire à oiseaux pour les ornithologues en herbe.
Si vous êtes intéressés par la nature et particulièrement les oiseaux, et que vous avez du mal à les photographier, tant ils décollent aussi vite qu’ils sont arrivés dans votre jardin. Cette mangeoire vous permettra d’avoir toujours le bon cliché, pris au plus près.
Dès qu’un oiseau se posera sur la mangeoire pour se délecter des graines que vous lui proposez, il déclenchera un appareil photo qui va le photographier. Il va vous envoyer une notification sur votre smartphone et vous pourrez ainsi visionner votre visiteur en temps réel sur votre écran.
Mais cela ne s’arrête pas là, puisqu’il est capable de reconnaître l’espèce de l’oiseau grâce à une intelligence artificielle. Pour cela, il va comparer l’oiseau visuellement mais aussi par son chant, avec une base de données de 1 000 espèces. Et en plus de vous l’afficher, il enverra ces informations, si vous le désirez, à une base de donnée aidant les scientifiques à connaître la migration des oiseaux et ainsi à mieux les protéger.
Et petit bonus, cette caméra offerte sur votre jardin peut être utilisée même quand il n’y a pas d’oiseaux. Si vous êtes loin de chez vous, vous pouvez toujours aller voir si tout va bien depuis votre écran.
Avec le réchauffement climatique, il est urgent de changer nos pratiques de production de l’énergie. Nous avions bien la piste du nucléaire avec les centrale à fission, mais elles s’est avérée dangereuse notamment avec les cas de Tchernobyl en 1986 et Fukushima en 2011. Il est donc préférable de trouver d’autres voies, plus sécuritaires.
Nous avons déjà parlé des futures centrales nucléaires à fission, qui par définition ne peuvent pas s’emballer et donc exploser. De plus, elles n’émettent que très peu de déchets. Vous pourrez retrouver mes explications dans ma chronique numéro 3, dans la fiche ici !
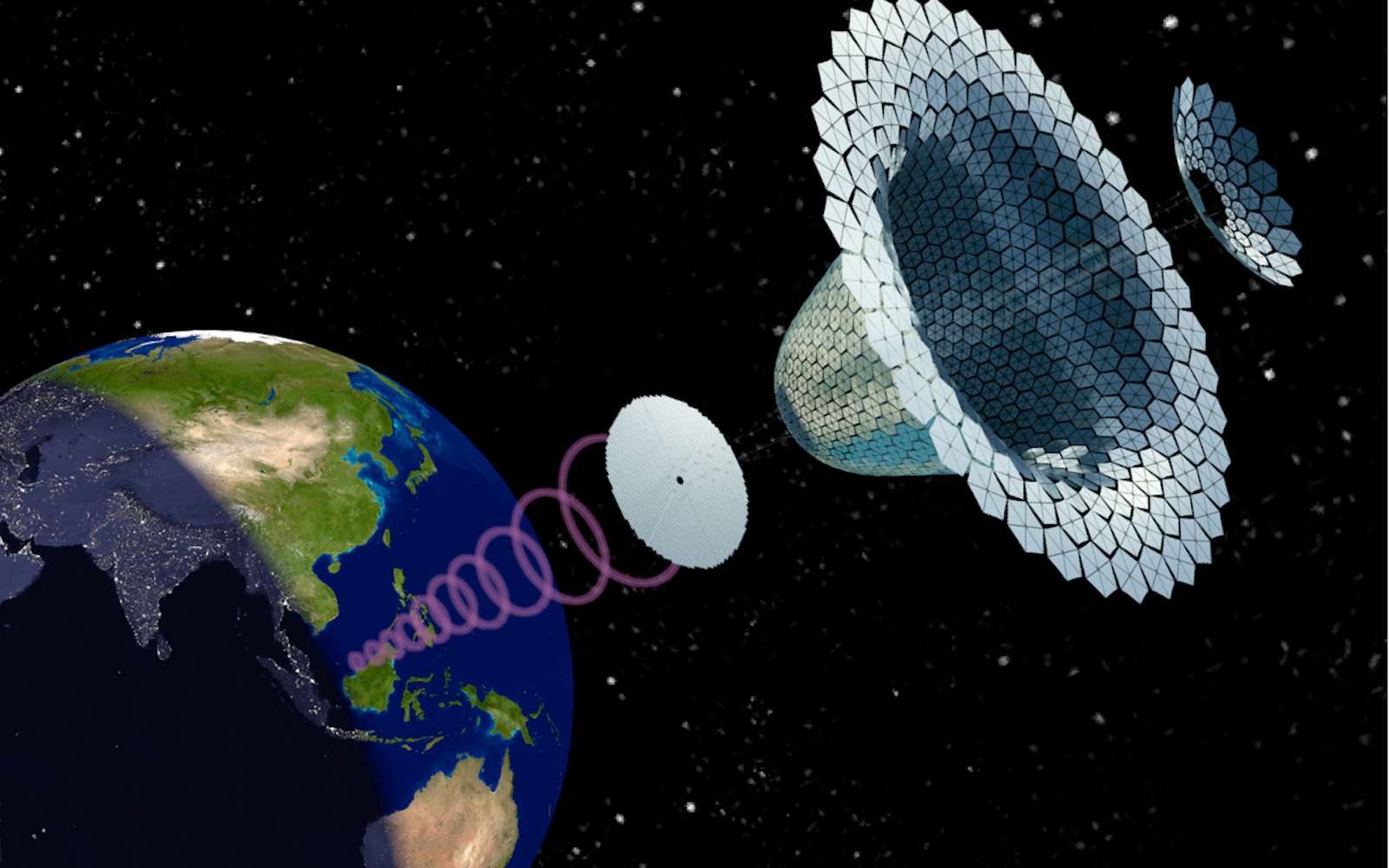
Une autre solution a été théorisée dès 1920 par le père de l’astronautique, le scientifique russe Constantin Tsiolkovsky. Le principe est simple, mettre des panneaux solaires directement dans l’espace !
Ben ! Pourquoi dans l’espace ?
Sur Terre, les panneaux solaires ne peuvent pas fonctionner à plein régime. Toute l’énergie solaire n’atteint pas les panneaux que l’on place sur nos maisons ou dans les déserts, elle est filtrée par l’atmosphère en grande partie. Notamment, la couleur bleue a du mal à traverser l’atmosphère pour atteindre le sol. De plus, cela ne fonctionne que quelques heures par jours…
Ben oui, des fois il fait nuit !
Il faut nettoyer les panneaux régulièrement pour que la poussière n’empêche pas les rayons d’atteindre les cellules. S’il ne fait pas beau, c’est autant de luminosité perdue. Et la Terre tourne sur elle-même, le soleil n’est pas constamment au-dessus des panneaux solaires. Certes, on trouve désormais des panneaux qui se déplacent pour être toujours en face du soleil.
Mettre des panneaux solaires en orbite, c’est éliminer une bonne partie des inconvénients des panneaux solaires placés sur Terre. Ici, l’atmosphère ne filtre plus le bleue ni quoi que ce soit, les cycles jour/nuit sont moins longs (mais plus fréquents). La même surface de panneaux solaire peut produire entre 6 et 8 fois plus d’énergie que sur Terre.
C’est bien joli, mais comment on envoie l’énergie sur Terre ? Avec une fusée ?
Nous n’utilisons évidemment pas de fusée pour faire l’aller-retour entre la Terre et la centrale solaire en orbite, en chargeant de lourdes batteries. Ce serait complètement idiot.
Tout simplement, la centrale transforme l’énergie solaire en un faisceau de micro-ondes qui est pointé en direction d’une antenne située sur Terre. L’énergie y est récoltée et transformée en électricité, puis envoyée dans le réseau.
Chouette ! On commence quand ?
Et bien c’est fait !! En 2019, les chinois avaient annoncé un projet d’expérimentation en orbite pour 2021 avec une première vraie centrale exploitable en 2035.
Mais la Chine vient de se faire coiffer au poteau par les États-Unis ! C’est la petite navette spatiale autonome et réutilisable, la X37-B, de l’armée de l’air américaine, qui a déployé un petit panneau solaire de 30 cm de côté en orbite.
L’expérience fut concluante : le petit panneau a capté l’énergie solaire, l’a transformé en un faisceau de micro-onde qui a été ensuite capté par une antenne au sol pour produire de l’électricité.
Quelle quantité ?
Environ 10 watts, de quoi recharger un smartphone ou allumer une ampoule LED.
Tout ça pour ça ?
Oui, ce n’était qu’une expérimentation. Maintenant que le principe est validé, il devient envisageable de déployer dans quelques années d’immenses centrales solaires en orbite géostationnaire, voire même aux points de Lagrange, afin de ne plus à gérer les cycles jours/nuit.
Pour une future centrale de 5 Gw, pouvant subvenir aux besoins de 5 millions de foyers, soit 15 millions d’habitants environ, il faut construire une centrale de 10 000 tonnes, soit 25 fois l’ISS, la Station Spatiale Internationale. C’est là que l’on peut voir l’utilité de développer des lanceurs très lourds et réutilisables, comme le Starship de SpaceX, capable d’envoyer de très lourdes charges dans l’espace pour un tarif bien plus compétitifs que les tarifs utilisés aujourd’hui. Et pourquoi pas importer de la matière extraite de la Lune. C’est bien plus simple de satelliser une charge depuis la Lune que depuis la Terre. Et une imprimante 3D peut ensuite construire la centrale directement en orbite à partir de la matière première qu’elle reçoit.
Et surtout, il ne faudra pas négliger la taille de l’antenne réceptrice sur Terre. Suivant la taille de centrale émettrice, l’antenne pourrait atteindre plusieurs km de large au sol !
La centrale étant satellisée, on n’est pas obligé de rediriger le faisceau de micro-ondes toujours au même endroit. Il peut être envoyé n’importe où sur Terre, si une autre antenne est dans son champs de vision. On peut très bien imaginer une constellation de dizaines de centrales solaires, en orbite basse, qui jonglent avec les antennes au fur et à mesure du passage au-dessus d’elles. Et il est possible d’envoyer plus de faisceaux sur des antennes qui ont besoin de plus d’énergie que d’autres à certains moments. Cela peut être traité quasiment en temps réel et de façon automatisé suivant les besoins.
La notion d’opérateur d’énergie spatiale est tout à fait envisageable dans une vingtaine d’année, sur le même modèle que Starlink ou OneWeb pour Internet aujourd’hui. Si vous voulez en savoir plus sur Starlink, suivez la fiche sur ma chronique numéro 18 !
Vous voyez ce logo ? Je suis certain que certains ont cru reconnaître quelque chose ! Non, ce n’est pas le logo d’Aperture Science, le centre de recherche fictif de la série de jeux vidéo Portal.
C’est le logo de Sitia, un centre de recherche basé à Nantes et bien réel. Sitia existe depuis 1986, donc bien avant l’arrivée de la saga Portal. Cette société conçoit et réalise des machines dans le domaine de l’automation, de la simulation, de la mécanique et de l’informatique industrielle.
Et parmi ses spécialités, Sitia développe des robots agricoles. Son robot le plus impressionnant est le Trektor, un véritable tracteur complètement autonome, puisqu’il n’a même plus de cabine pour son pilote.
Les tracteurs actuellement sur le marché étaient déjà pourvus de systèmes de conduite autonome. A l’aide de balises pour affiner le positionnement par satellite, ce que l’on guidage par GPS RTK, ces tracteurs de précision n’avaient plus grand-chose à demander à leurs pilotes.
Désormais, avec le Traktor, son pilote n’a plus besoin d’être dans la cabine, qui a disparu donc. L’exploitant utilise une application sur sa tablette pour paramétrer les taches du robot et la surface de travail. Ensuite le Traktor se débrouille tout seul.
Sa largeur et sa hauteur peuvent être variées dans ses paramètres. Il peut donc enjamber des cultures et s’adapter à la largeur et la hauteur d’un passage. Il peut travailler sur des cultures très différentes, comme des vignes étroites ou larges, le maraîchage et la culture légumière de plein champs et l’arboriculture.
Sitia a tenu à ce que son robot soit compatible avec l’ensemble des accessoires de tracteurs du marché. Il possède donc un système de fixation arrière à trois points tout à fait conventionnelle.
Le Traktor utilise une motorisation hybride diesel et électrique pouvant délivrer la puissance d’un tracteur conventionnel de 50 chevaux. Sa vitesse de travail est de 10 km/h. Son autonomie au travail est de 8 heures et sa batterie se recharge en 5 heures.
Pour plus d’informations sur la robotique agricole, vous pouvez découvrir un système de drones qui ramassent les fruits dans un verger, dans la chronique numéro 17, dont voici la fiche.
Les voitures autonomes, on commence à en parler depuis un moment. Peut-être êtes-vous déjà utilisateur d’une Tesla ou d’une Nissan Leaf avec des fonctions autonomes. Ces voitures sont déjà capables de rouler toute seules sur des portions de route, comme des autoroutes ou des nationales à la signalisation au sol bien marquée. Par contre, vous devez garder vos mains sur le volant et rester aussi attentifs que si vous conduisiez. Ces voitures sont au niveau 2 d’autonomie. Pour en savoir plus sur les niveaux d’autonomie, vous pouvez vous reporter à ma vidéo numéro 8, disponible dans mes fiches ici.
Honda s’apprête à commercialiser la première voiture avec une autonomie de niveau 3, la Legend Hybrid EX. Ce niveau d’autonomie permet à la voiture de rouler toute seule sur des portions de routes qui seront suffisamment adaptées pour ce type de véhicules, comme une autoroute. Elle est capable de prendre la décision de doubler, suivant la vitesse que vous aurez paramétré à votre régulateur.
La grande différence avec les voitures de niveau 2, c’est qu’en niveau 3, vous pourrez en profiter pour lâcher le volant. Votre attention pourra alors se porter sur autre chose que la route. La voiture embarque même un lecteur DVD qui pourra être activé lorsque votre véhicule est en mode autonome.
Mais, nous ne sommes encore qu’en niveau 3, il est donc hors de question de vous endormir ou de tourner le siège vers l’arrière pour une partie de cartes. Pour cela, vous devrez attendre le niveau 4. Ici, la voiture pourra à tout moment vous demander de reprendre les commandes. Des caméras tournées vers le conducteur vérifieront à tout moment si vous êtes capable de reprendre ou pas les opérations. Si ce n’est pas le cas, elle utilisera des alarmes sonores et vibrantes au niveau de la ceinture de plus en plus fortes. Si vous refusez de vous mettre en situation, ou que vous n’êtes simplement plus en état de reprendre les commandes, la voiture commencera à décélérer, se mettra en warning et ira se garer sur le côté de la route.
Honda est donc le premier constructeur à avoir le droit de commercialiser une voiture de niveau 3 d’autonomie, à destination du grand public. D’autres devraient suivre dans les prochains mois. La Honda Sensing Elite est disponible uniquement sur le territoire japonais pour le moment. Les lois françaises sont pour le moment très strictes, et se sont même refermées un peu plus ces derniers mois, par rapport aux véhicules autonomes. Nous risquons donc de devoir attendre quelques années de plus avant de voir débarquer des voitures de niveau 3 sur notre territoire.
Starlink va très bientôt ouvrir la commercialisation de ses services en France.
C’est quoi Starlink ?
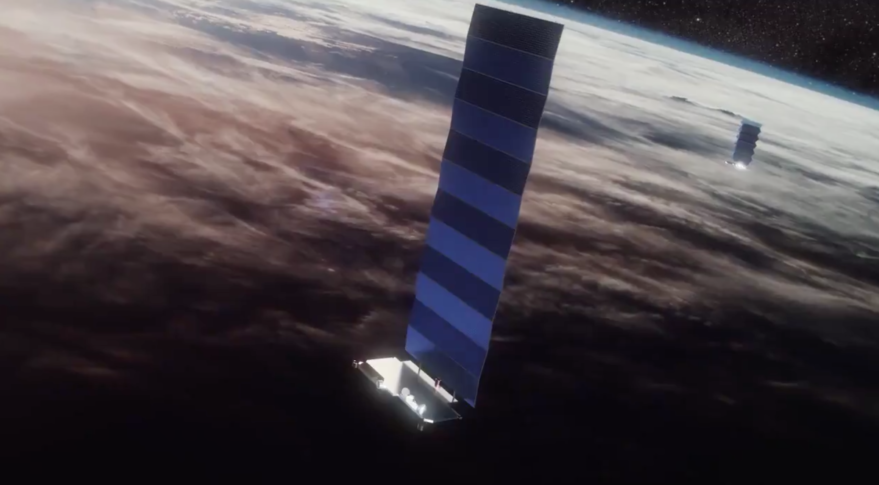
C’est une nouvelle façon de recevoir Internet, où que vous soyez sur Terre, et à haut débit. Le système repose sur une constellation de satellites. Et où que vous soyez sur la planète, vous pouvez toujours pointer une antenne sur votre toit pour accéder à Internet. Cela fonctionnera partout, même dans la campagne la plus profonde, au cœur d’un désert, au sommet d’une haute montagne, même si vous êtes dans ce que l’on appelle une zone blanche.
Internet par satellite, cela existe depuis plus de 20 ans déjà !
Effectivement, des fournisseurs d’accès à Internet disposent déjà de tels services. Vous pouvez déjà accéder à du haut débit par ce biais, mais il y a de nombreux défaut avec ces services. Les satellites utilisés sont des satellites géostationnaires, c’est à dire qu’ils sont sur une orbite où leur vitesse de déplacement autour de la Terre est rigoureusement la même que la vitesse à laquelle notre planète tourne. Du coups, ils sont toujours exactement au même endroit au-dessus de nos têtes. Il suffit donc de pointer l’antenne dessus.
En quoi c’est un défaut ?
Tout simplement, l’orbite utilisée pour les satellites géostationnaires est situé à 36 000 km de la Terre. Et cela commence à être loin pour y envoyer et recevoir des données. Imaginez que vous lancez une requête sur un moteur de recherche de vidéo. Votre requête est envoyée au satellite à la vitesse de la lumière. Il faut donc 120 millisecondes pour atteindre le satellite. Le satellite renvoie ensuite votre requête sur une antenne située sur Terre, ce qui prends de nouveau 120 millisecondes. Votre requête va ensuite sur le serveur de votre moteur de recherche : Google, Youtube, Netflix, etc. Ce serveur renverra le résultat à l’antenne située sur Terre. Ces temps de trajets sur Terre sont très courts car les distances sont petites, de l’ordre de quelques millisecondes. L’antenne renverra le résultat au satellite, 120 millisecondes supplémentaires. Et le satellite renverra enfin le résultat à votre propre antenne, et encore 120 millisecondes. Nous sommes au minimum donc à un total de 480 millisecondes, rien que pour les trajets entre la Terre et le satellite. En comptant la latence supplémentaire, via les serveurs et la gestion de perte de paquets, nous arrivons en réalité à une durée de 650 ms entre votre requête et la réponse. C’est ce que l’on appelle le ping.
Hoo, ça va ! C’est pas la mort d’attendre, c’est même pas une seconde !
Oui, sur une recherche sur Youtube ou Netflix, attendre un peu plus d’une demi-secondes, ce n’est pas embêtant. Surtout qu’une fois que votre vidéo est lancée, le débit peut être assez bon. On parle de 50 Mb/s en réception et 8 Mb en émission, ce qui est loin d’être mauvais. On a l’équivalent d’un très bon ADSL ou du débit d’une petite fibre.
Mais si je parle de ping de 650 ms à un joueur par exemple, il vous dira que ce n’est même pas la peine d’y penser ! Un ping aussi important ne vous donne accès qu’aux applications non interactives, uniquement de consultation. C’est, par exemple, absolument impossible de jouer en ligne, faire du partage d’écran ou utiliser des éditeurs de documents en ligne comme Google Docs ou Office en ligne. Il vous faudra attendre 650 ms avant que vous puissiez voir le chiffre que vous venez d’entrer dans votre document. Et pareil entre chaque caractère ! Pour les joueurs en ligne, cela devient tout simplement inutilisable car la moindre direction que vous entrez ne sera perçu par le serveur que 325 ms plus tard et 650 ms sur votre écran. Pendant ce temps les autres joueurs vont auront déjà fragué 3 fois ou votre voiture se sera pris le premier poteau sur le rebord de la route. Un ping classique sur réseau 4G ou par l’ADSL est de 20 à 50 ms et le ping de la fibre ne dépasse généralement pas les 3 à 5 ms.
Et en quoi Starlink est une révolution ?
Tout simplement, les satellites sont à une altitude bien plus basse, environ 550 km seulement, soit 65 fois plus prêts ! Le ping est donc divisé par 65, on arrive entre 10 et 20 ms, ce qui est largement suffisant pour les applications interactives et le jeu.
Comment ce satellite reste au-dessus de nous alors ?
C’est tout simplement une autre approche qui est utilisée. Il n’y a plus un seul satellite géostationnaire au-dessus de vous, mais toute une constellation de satellites. A l’heure d’aujourd’hui, ce sont près de 1000 satellites Starlink qui sont répartis au-dessus de nos têtes. Lorsque vous pointez une antenne de la constellation, vous êtes sûr d’avoir toujours au moins un satellite avec qui communiquer.
Très régulièrement, SpaceX envoie plusieurs dizaines et bientôt des centaines de satellites d’un coups à bord de leurs fusées Falcon 9 et bientôt Starship. D’ailleurs, si vous voulez plus d’informations sur la future fusée Starship, la plus puissante de l’histoire, vous pouvez vous rendre sur ma chronique numéro 7 dont voici la fiche.
L’objectif annoncé par Starlink est d’avoir en tout 42 000 satellites en orbite pour une utilisation optimale.
Ce sont pas ces satellites qui gênent les astronomes ?
Oui, effectivement. Starlink est une source de pollution lumineuse. Lorsqu’une fusée Falcon 9 déploie ses dizaines de satellites à chaque lancers, nous pouvons les voir à la queue-leu-leu, dans le ciel au coucher du soleil ou à son lever. Les rayons de notre étoile viennent rebondir sur eux et ils deviennent ainsi très visibles, sous la forme d’un ligne de points quasiment immobile dans le ciel. Certaines de ces lignes ont déjà été prises pour des OVNIs par des personnes ne connaissant pas le phénomène.
Cette pollution lumineuse pose notamment problème aux astronomes qui ne peuvent plus observer d’astres qui se situent dans la zone où se trouve cette traînée, à trop forte luminance. SpaceX tente à chaque envoi de trouver une solution, notamment en peignant ses satellites avec une peinture qui ne réfléchit pas la lumière. C’est mieux, mais ce n’est pas encore parfait.
Et c’est un problème permanent ?
Non, heureusement. Les satellites Starlink ne sont un problème que pendant la durée de leur mise en orbite. Une fois que chaque satellite a rejoint sa place définitive, le problème disparaît.
C’est pas un problème tous ces satellites là-haut ?
Effectivement, beaucoup de satellites en fin de vie posent problème. Ils peuvent entrer en collision entre eux et leur destruction peut causer la création de milliers, voire millions de petites pièces qui fileront à des vitesses vertigineuses dans l’espace. Si une fusée ou un astronaute se retrouve sur la trajectoire d’un de ces satellite ou d’un de ses débris, cela peut devenir un piège mortel.
Pour les satellites en fin de vie, nous les plaçons souvent dans ce que l’on appelle des orbites garage, c’est à dire des orbites où l’on envoie peu de missions, habitées ou automatiques. De plus, même si l’on regarde une carte des débris spatiaux, nous avons l’impression que c’est devenu une immense poubelle ! Or, en réalité, chaque point que nous voyons est à des centaines, voire des milliers de km, les uns des autres. C’est aujourd’hui encore très peu probable de se retrouver sur la trajectoire de l’un d’eux. Mais ce n’est pas impossible, non plus !
Enfin, les satellites Starlink sont envoyés en orbite basse, à seulement 550 km d’altitude. A cette altitude, même si l’atmosphère y est extrêmement rare, elle n’est pas encore complètement absente. Les satellites en fin de vie vont donc freiner leur course progressivement, en se rapprochant de plus en plus de notre planète. Jusqu’au jour où ceux-ci seront trop freinés pour se maintenir en orbite et viendront exploser sous la forme d’une simple étoile filante lorsqu’ils rentreront, à haute vitesse, dans les hautes couches de l’atmosphère.
Quel est le prix d’une connexion à Starlink ?
C’est là où le bas blesse. Le tarif se repose sur les tarifs de connexion à Internet aux États-Unis. Il ne faut pas oublier que l’Europe et la France bénéficient de tarifs très avantageux par rapport au reste du globe. Aux États-Unis, une connexion Internet est de l’ordre de 100 $ par mois quand nous avons le droit à des tarifs situés entre 10 et 50 € par mois suivant les services dont vous avez besoin.
Pour vous connecter à Starlink, il vous faudra déjà acquérir une antenne compatible au tarif d’environ 500 €, puis vous aurez à payer un abonnement d’environ 100 € tous les mois. C’est pourquoi, du moins en Europe, sauf si les prix baissent plus tard, Starlink sera à réserver pour les zones blanches, là où le haut débit n’est pas encore accessible.
Et quel est le débit justement ?
Aujourd’hui, avec seulement 1 000 satellites en orbite sur les 42 000 prévus, Starlink propose un débit d’environ 50 Mb par secondes, en gros un très bon ADSL ou un petit débit fibre. Le ping est encore assez haut, puisqu’il est de 20 à 40 ms, mais déjà 10 fois inférieur à un ping de satellite géostationnaire.
Elon Musk a annoncé qu’avant la fin de l’année, les débits devraient grimper à 300 Mb et le ping baisser à 20 ms. Nous commençons à avoir ici les capacités d’une connexion fibre de bonne qualité.
Y a t-il des concurrents à Starlink ?
Oui, mais pas encore opérationnels. Les anglais OneWeb ont déjà lancés quelques dizaines de satellites de leur flotte avec des fusées russes Soyouz. La future fusée européenne Ariane 6 est pressentie pour continuer la livraison des satellites lorsque celle-ci sera, elle-même, opérationnelle en 2022. La constellation OneWeb devrait comporter 2 000 satellites dans sa flotte.
Amazon travaille également sur un projet de flotte de satellites, le projet Kuiper, qui devrait déployer 3 236 satellites en 10 ans.
D’ici une dizaine d’année, il est fort possible que les tarifs de connexion à ces constellations de satellites deviennent aussi intéressants que les offres fibres ou 4G et 5G. Ces constellations pourraient donc, à terme, supplanter les opérateurs Internet pour les foyers en offrant une mise en place plus aisée que les offres filaires actuelles.
Quand aux appareils mobiles, à moins que des antennes satellites puissent être assez miniaturisées pour être intégrées dans nos téléphones, lunettes connectées et ordinateurs, tout en pouvant fonctionner à l’intérieur de bâtiments, ceux-ci continueront probablement de fonctionner encore sur des réseaux hertziens comme le font nos réseaux 4G et 5G actuels. Mais, sait-on jamais !
Dans quelques décennies, nous devrions commencer à utiliser des centrales à fusion afin de produire de l’énergie propre tout en se protégeant de tout accident potentiel sur une centrale à fission nucléaire actuelle. Pour en savoir plus, je vous propose de cliquer sur l’épisode numéro 3 disponible dans mes fiches.
En attendant cette révolution de la production énergétique, le Danemark va tenter une nouvelle voie très prometteuse.
A 80 km de la côte ouest du pays, le Danemark va construire une immense ferme éolienne qui devrait compter plusieurs centaines d’éoliennes reliées à une île artificielle de 120 000 m², soit la superficie de 18 terrains de football. Ce projet à 28 milliards d’Euros sera le plus grand projet de construction de l’histoire du pays.
La puissance générée par ces éoliennes devrait produire tout d’abord 3 Gw/h entre 2027 et 2030, puis jusqu’à 10 Gw/h à terme.
Et ça donne quoi ?
Disons que 10 Gw/h suffisent pour alimenter jusqu’à 10 millions de foyers ! Par comparaison, une centrale nucléaire à fission actuelle ne dépasse que rarement 1 Gw/h. Et 10 Gw/h représente le tiers de la consommation d’un pays comme la France.
Mais il n’y a que 8 millions d’habitants au Danemark !
C’est là que cela devient intéressant. C’est que non seulement, l’ensemble du pays sera couvert, mais le Danemark pourra également commercialiser l’excédent d’énergie aux pays qui l’entourent !
Haaa, malin !
Le Danemark s’est engagé à réduire de 70 % ses émissions de CO2 d’ici 2050 ! Après avoir annoncé se passer de ses gisements de pétroles et de gaz dans la mer du Nord à la même période, le pays devrait devenir un exemple de la transition énergétique.
L’impression 3D est une véritable révolution dans de nombreux domaines. Nous l’avons déjà vu notamment pour son exemple dans la construction de bâtiments. Vous pouvez retrouver cette chronique dans l’épisode numéro 13, qui est dans cette fiche.
Cette fois-ci, nous allons voir une de ses applications dans le domaine médical. C’est d’ailleurs loin d’être la seule application de l’impression 3D dans le milieu médical.
Il est déjà possible d’imprimer des dents, des os, voire des organes avec une imprimante 3D. Mais jusque là, l’impression était faite à l’extérieur du corps humain, puis implantées ensuite.
Ici, la nouveauté vient du fait que des chercheurs australiens ont mis au point une technique pour imprimer de l’os directement dans le corps du patient.
Pour éviter tout rejet d’un os artificiel, il était, jusqu’à présent, question de faire des greffes osseuses autologues. C’est à dire que la réparation d’os était faite à partir de bouts d’os ponctionnés ailleurs sur le squelette du même patient. Ce qui multiplie la durée des interventions, voire même leur nombre, et cela pouvait causer des préjudice à la partie ponctionnée.
Les travaux de ces chercheurs ont menés à expérimenter une impression 3D, directement sur le patient, à température ambiante. Les tissus imprimés sont un mélange de céramique et de cellules vivantes provenant du patient. Ces cellules vont se multiplier ensuite, naturellement, pendant plusieurs semaines jusqu’à réparer l’os de façon durable.
Sauf si vous habitez une grotte, vous avez dû voir que quelque chose venait d’arriver sur Mars !
Vous vous dites peut-être que c’est un grand battage médiatique pour un énième robot que l’on envoie sur Mars, pas de quoi en faire un plat !
D’un côté, vous n’avez pas tord ! La première tentative de vol automatique en direction de Mars date de 1960, avec Mars1960A, à peine 3 ans après Spoutnik, le premier satellite artificiel et ses petits ‘bip bip’. Ces petits ‘bips’ étaient simplement une preuve que les radio-amateurs pouvaient percevoir comme quoi les russes avaient réussis à envoyer un objet en orbite.
A cette époque, beaucoup croyaient encore aux martiens, à des chenaux qu’ils avaient creusés sur toute la planète pour l’irriguer depuis les pôles. Ce mythe provient du livre « La Pluralité des Mondes » de 1862, de Camille Flammarion, celui là même, qui a créé les éditions Flammarion. L’auteur se basait sur le résultat des observations de la planète avec le matériel de l’époque. Des taches et des rayures semblaient naître régulièrement. Et plutôt que de remettre en question leur matériel, ils ont préférés imaginer des mondes extraordinaires.
C’est bien de garder une part de rêve, non ?
Vu les connaissances de l’époque, c’est normal en effet. Mais cela manquait cruellement de rigueur scientifique.
Bon, et ce robot des années 60 ?
Ce fut un échec… comme ses successeurs 1960B, 1962A, 1962B, 1962C, Mars1, Zond2 et Mariner 3. Et finalement comme environ une mission sur 2 qui tente d’aller en direction de la planète rouge.
C’est finalement en juillet 1965 que la sonde américaine Mariner 4 s’approche suffisamment de Mars pour la survoler et envoyer ses premières photos depuis l’espace.
Haaa ! Ils ont dû être heureux alors !
Ben, pas vraiment… Ils s’attendaient à un monde un peu plus aride que la Terre mais avec des traces de vies comme de la végétation. Et finalement, les 22 photos en basse résolution qui arrivent montrent un paysage gris semblable à la Lune, avec de nombreux cratères d’impacts. De plus, on ne détecte qu’une très fine couche atmosphérique, une température au sol de 100° en dessous de 0 et pas de champs magnétique. Adieu les fantasmes de nouveaux continents à explorer ! On ne croit définitivement plus à la vie sur cette planète…
En novembre 1971, Mariner 9 est la première mission qui arrive à atteindre Mars et même à se satelliser autour de la planète. Ce n’est désormais plus un simple survol mais on va pouvoir cartographier une bonne partie de la planète.
Cool ! On a dû découvrir toutes les merveilles de Mars !
Non… Lorsque la sonde est arrivée en orbite martienne, une grosse tempête battait son plein. Elle avait dégagé un nuage de poussière qui occultait toute la planète. On ne voyait rien ! Heureusement, cette tempête se calma et la poussière retomba sur le sol après un mois d’attente.
Même si la planète semblait toujours aussi aride, elle nous a quand même offert un beau spectacle en dévoilant des paysages bien plus intéressants que les missions précédentes, avec des volcans de 21 km d’altitude, des canyons de 6 km de profondeur, et même ce qui pourrait ressembler à d’anciens lits de rivières ! On s’est de suite mis à imaginer de nouveau de la vie sur la planète, au moins dans un lointain passé.
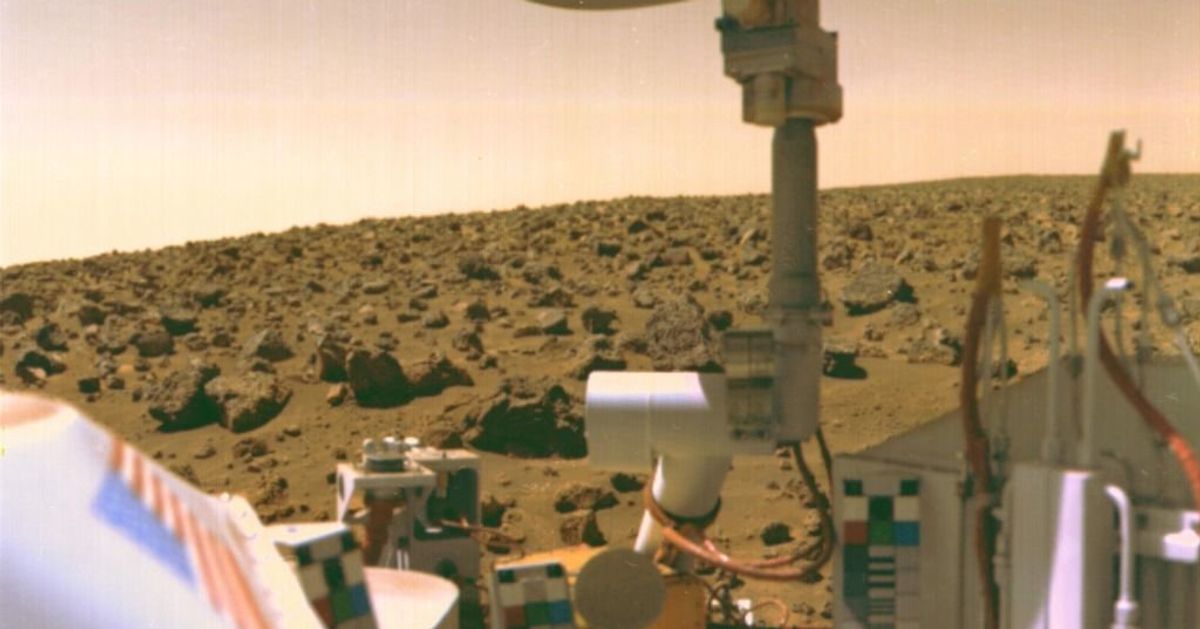
Alors qu’ils excellaient pour explorer la planète Venus, les russes n’arrivaient jamais à atteindre Mars. Ce sont encore les américains qui arrivèrent à poser pour la première fois non pas un atterrisseur, mais deux : Viking 1 et 2, en septembre 1976. C’est un succès total, ils transmettront des photos et des données à la Terre pendant 6 ans !
Pourquoi en envoyer deux d’un coups ?
Puisqu’une mission martienne sur 2 est un échec, on a forcément plus de chances d’arriver à bon port avec deux missions envoyées à quelques jours près.
Les missions Viking apportent enfin les premières images depuis le niveau du sol. On découvre qu’il y a probablement eu de l’eau liquide dans un très lointain passé et on découvre des variations de CO2 dans l’atmosphère. Certains y voient le résultat d’une activité géologique, d’autres d’une activité microbienne.
En juillet 1997, pour la première fois, Mars recevait un robot capable de se mouvoir sur le sol. Le rover Sojourner est enfermé dans l’atterrisseur Pathfinder, lui-même enfermé au milieu de tout un ensemble de ballons qui touchent le sol puis rebondissent plusieurs fois, afin de protéger sa cargaison. Le rover est un petit robot monté sur 6 roues de 10,5 kg pour 65 cm de long et 30 cm de haut. Avec 6 minutes entre le moment où l’on envoie un ordre au robot et le moment où il reçoit l’ordre, il est très difficile de le piloter à distance. Il a un mode autonome rudimentaire qui lui permet d’avancer sans attendre un retour de la Terre, soit 6+6 minutes, donc 12 mn après un éventuel blocage. Le robot avait pour mission de survivre 7 jours et il a travaillé plus de 80 jours, et s’est déplacé sur 100 mètres. Il a découvert des roches aux bords arrondis comme s’ils s’étaient entrechoqués dans une rivière. On a également vu apparaître de petits nuages dans le ciel.
Pour l’anecdote, le robot Sojourner a été mis au point par les mêmes ingénieurs qui ont créés, plus tard, les robots aspirateurs Roomba !
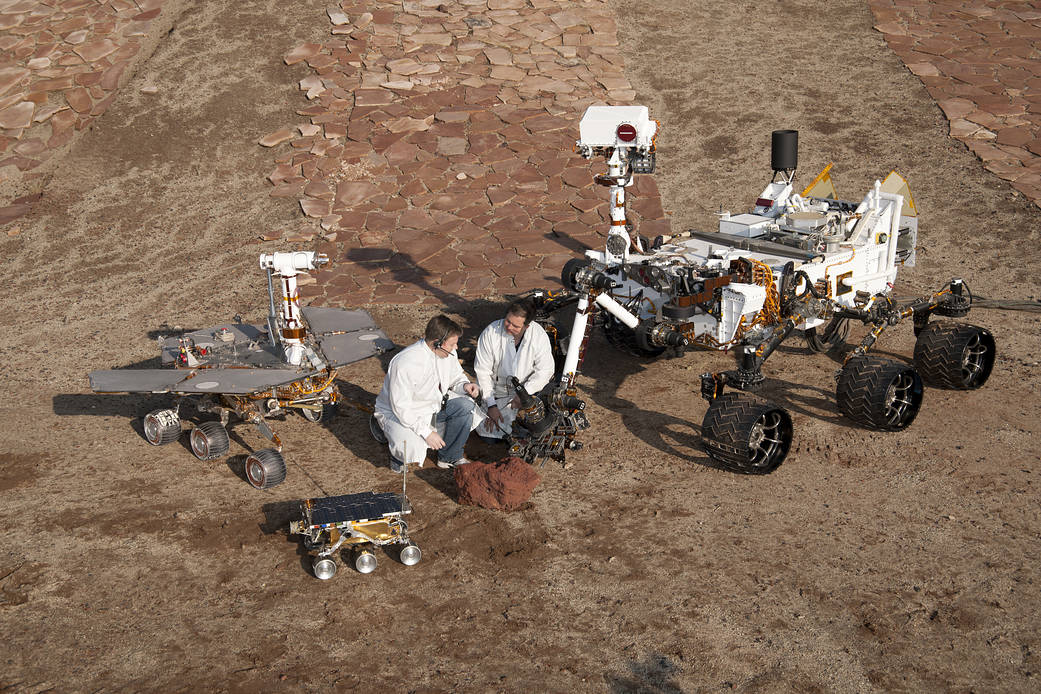
En janvier 2004, deux nouvelles missions américaines ont réussis à se poser avec chacune un robot bien plus important que Sojourner. Ce sont les infatigables Spirit et Opportunity. Ils devaient fonctionner avec leurs panneaux solaires pendant 3 mois et parcourir 600 mètres. Spirit a finalement fonctionné 6 ans avant de s’embourber dans une dune de sable après un parcours de presque 8 km. Et Opportunity a travaillé pendant 14 ans et a parcouru 45 km ! C’est une tempête de sable qui a encrassé ses panneaux solaires qui ont fini par lui couper toute son énergie. Bien plus gros que Sojourner, Spirit et Opportunity avait une longueur de 260 cm et une hauteur de 150 cm pour un poids total de 185 kg. Ils ont atterris grâce à une série de ballons qui ont amortis la chute avant de rebondir, comme pour Sojourner. Ces deux robots ont confirmés les traces d’écoulements d’eau par le passé, il y a 3,5 milliards d’années. L’eau a même formé des rivières, des lacs et des mers.
En 2012, c’est au tour du robot Curiosity de partir seul sur Mars. De la taille d’un gros 4×4 pour 900 kg, ce robot ne fonctionne plus avec des panneaux solaires mais avec une mini centrale nucléaire embarquée. Il a ainsi assez de puissance pour faire fonctionner de nombreux appareils, dont des fours à haute température pour analyser les roches. Le robot est conçu pour parcourir 20 km et son énergie embarquée peut le faire fonctionner pendant 14 ans, soit jusqu’en 2026.
Avec sa très lourde charge et l’envie de ne pas polluer par avance, par des bactéries terriennes, le lieu où le robot va se poser, Curiosity a atterri d’une étrange façon. Ici, pas de ballons pour faire rebondir l’engin, on commence également à réfléchir comment faire atterrir de très lourdes charges. Curiosity est enfermé dans une capsule qui le protège lors de son entrée dans l’atmosphère. Puis, un parachute se déploie. Ensuite, Curiosity est accroché à un système de propulsion qui s’allume pour ralentir encore la descente avant de se stabiliser à une vingtaine de mètres d’altitude. Le robot descendra ensuite par une grue, le Sky Crane. Lorsque le robot touchera le sol, l’appareil muni de propulseur se détachera et ira s’écraser plus loin.
Vous imaginez que les 7 minutes de cette descente, avec la complexité que cela engendre, sont d’une terreur énorme pour les ingénieurs de la NASA qui ne peuvent rien faire à une telle distance. Ils ne font que lire la télémétrie et les différentes logs qui indiquent que les étapes se sont bien passées les unes après les autres. Cette expression des « 7 minutes de terreur » est depuis restée.
Même si ce rover est américain, de nombreux appareils scientifiques embarqués sur le robot sont européens, et même français. De nombreux scientifiques toulousains collaborent sur Curiosity. D’où une certaine fierté nationale autour de ce robot.
Avec plus de 20 km déjà parcourus, Curiosity nous a apporté un lot conséquent d’images de paysages fantastiques de montagnes, de dunes, de cratères. Le robot a découvert un ancien lac, un cycle du méthane qui pourrait provenir d’une vie microbienne, des traces organique c’est à dire les briques nécessaires pour fabriquer la vie.
Et Perseverance ?
La semaine dernière, c’est au tour du robot Perseverance d’atterrir sur Mars. Ce robot est un cousin très proche de Curiosity. Ils ont la même apparence, la même façon d’atterrir mais des expériences scientifiques différentes. Curiosity devait détecter des traces de matières organiques, et il l’a fait. Perseverance va essayer d’aller plus loin et détecter des traces de vie microbienne, passées voire présentes. Comme Curiosity, de nombreux instruments scientifiques embarqués sont d’origine française et des scientifiques toulousains travaillent en étroite collaboration avec l’équipe américaine.
Le robot va prélever des échantillons qu’il va analyser dans son propre laboratoire. Et les plus intéressants seront placés dans des tubes scellés qui seront déposés sur le sol le long de son parcours.
Comme le petit Poucet ?
Exactement ! Et c’est une mission conjointe entre l’Europe et les Etats Unis qui devrait atterrir en 2026 qui fera le même parcours pour récupérer les tubes scellés avant de les renvoyer sur Terre, avec une date d’arrivée en 2031, pour une analyse beaucoup plus poussée. Cela pourrait être notre premier retour d’échantillons du sol martien, sauf si une autre mission précipite ces dates. Et le retour d’échantillons est la dernière étape avant que la NASA ne décide d’envoyer une mission habitée.
Autre particularité de cette mission, Perseverance va déposer Ingenuity, le premier hélicoptère qui volera ailleurs que sur Terre. Mars a une atmosphère bien plus mince que sur Terre, le petit hélicoptère de 2 kg devra déployer beaucoup de force pour se maintenir en vol. Ses pales devront tourner 10 fois plus vite que s’il était sur Terre. C’est pour cela qu’il ne fera que quelques vols de quelques minutes entre deux recharges par son petit panneau solaire. Ses plus longs vols ne devraient pas excéder 5 mètres d’altitude sur une distance de quelques centaines de mètres. Ingenuity n’est censé faire que 5 vols de qualifications sur un mois, pour valider le concept, avant d’être simplement abandonné sur place. Mais il ouvrira un nouveau champs de futurs vols bien plus conséquents dans les années à venir.
Cueillir les fruits dans un verger est une tache longue et fastidieuse. Trouver des jeunes qui veulent faire « les saisons » devient de plus en plus compliqué. N’étant pas toujours ramassés à temps, une partie des fruits finissent par pourrir et ne sont plus commercialisables. La pénurie de cueilleurs de fruits entraîne la perte d’environ 10 % des fruits d’un verger.
Tevel Aerobotics a mis au point un cueilleur de fruits automatisé. Ce n’est pas le premier, il en existe déjà qui utilisent des bras de robots pour venir chercher les fruits les uns après les autres.
Le système FAR repose sur un ensemble de drones quadricoptères qui volent en permanence au-dessus d’un chariot qui circule lentement entre les rangs. Les drones repèrent les fruits, estiment leur mûrissement et vient les ramasser si ceux-ci sont prêts à être commercialisés. Le drone se rapproche et attrape le fruit avec une pince à trois doigts puis le tourne sur lui-même pour le détacher. Enfin le robot lâche le fruit au-dessus du chariot.
Il faut charger les drones très souvent, non ?
L’ingéniosité du système FAR est que les drones possèdent une espèce de cordon ombilical qui le rejoignent au chariot. Celui-ci possède une grande batterie qui permet aux drones rattachés de pouvoir voler plusieurs heures.
Le producteur peut suivre en direct le ramassage des fruits depuis une application qui lui indique en permanence le niveau de mûrissement ou la moyenne des calibres des fruits.
FAR ne sait actuellement travailler qu’avec les pommes, les oranges et les avocats.
De plus en plus, le métier d’agriculteur se dirige vers le métier de gestionnaire.
Dans ma chronique numéro 11, je vous expliquait la différence entre la réalité virtuelle, la réalité augmentée et la réalité mixte. Je vous présentais ainsi le principe des lunettes de réalité mixte de Vuzix. Vous pouvez retrouvez cette vidéo en cliquant sur la fiche qui se trouve ici !
Mojo Vision veut aller plus loin que les lunettes de réalité mixte et travaille sur un concept de lentilles de contact pouvant afficher des informations directement sur votre regard.
Plus besoin de porter des lunettes, ces lentilles sont reliées par un système sans fil à un appareil externe, probablement un smartphone caché dans votre poche. C’est lui qui s’occupe de tous les calculs.
Les lentilles vont pourvoir afficher toutes les informations dont vous aurez besoin dans votre vie quotidienne, comme vous rappeler le nom de votre interlocuteur, aider à diagnostiquer un patient ou rendre ludique votre pratique du sport. Les lentilles intégreront différents senseurs comme des accéléromètres ou une caméra, nécessaires pour son fonctionnement.
En fin de journée, il vous faudra quitter vos lentilles et les poser sur leur socle pour recharger leur batteries.
Mojo Vision n’a présenté encore aucun prototype fonctionnel à ce jour. Mais l’entreprise a été créée par des ingénieurs de Google et Apple et ils ont le soutien de Menicon, un constructeur de lentilles de vues japonais.
A mon avis, il ne faut pas s’attendre à un tel produit, à ce point miniaturisé, commercialisé avant quelques années encore. Cela reste encore un concept qui ne demande qu’à être concrétisé.